3深海作業機器人模型
(1)深海作業機器人動力學模型
設機器車重心和幾何中心重合,接地段的土壤特性為各向同性,履帶接地段的負荷和土壤分布為均勻分布。
當機器車直線運行時,得單履帶車體模型:
(3)
式中,M-深海機器人單側模型質量,kg;J-履帶驅動輪相對于轉軸的轉動慣量,kg·m2; ω-履帶的轉動角速度,rad/s;FxL-履帶與海底地面間的附著力,N;FyL-履帶的壓實阻力,N;FtL-履帶的推土阻力,N;Fw-深海機器人海水阻力,N;TmL-左履帶馬達驅動力矩,N·m;R-驅動有效半徑,m。
(2)液壓傳動系統模型
在機器車行駛系統中采用變量泵-定量馬達的容積調速回路。其中,電控變量泵由電液比例方向閥控制液壓缸改變柱塞泵斜盤傾角的方式改變柱塞泵的排量,從而實現液壓系統的流量控制。電液比例方向閥數學模型,采用電-U轉變為閥芯的位移量xv。機械轉換元件直接驅動閥芯運動,從而將輸入電壓信號
比例電磁鐵控制線圈的端電壓增量方程:
ΔU(s)=LsΔI(s)+(Rc+Rp)ΔI(s)+Kesxv(s) (4)
銜鐵組件的動態力平衡方程:
KIΔI(s)=mTs2xv(s)+BTsxv(s)+(ks+ky)xv(s)+T(s) (5)
閥芯動態力平衡方程:
T(s)=[mvs2+Bvs+(Kv+Kfv)]xv(s) (6)
式中,L-線圈電感,H;Rc,Rp-線圈和放大器內阻,Ω;Ke-線圈感應反電動勢系數,v;KI-比例電磁鐵電流力增益,N/A;mT-銜鐵組件質量,kg;BT-阻尼系數,N·s/m;Ks-銜鐵組件的彈簧剛度,N/m;mv-閥芯質量,kg;Bv-閥芯的粘性阻尼系數,N·s/m;Kv-閥芯對中彈簧剛度,N/m;Kfv-作用于閥芯上的穩態液動力剛度系數,N/m;ΔI-線圈電流,A;Ky-比例電磁鐵的位移力增益和調零彈簧的剛度之和,N/m;T-銜鐵外負載,N。
比例方向閥的模型框圖如圖3所示。
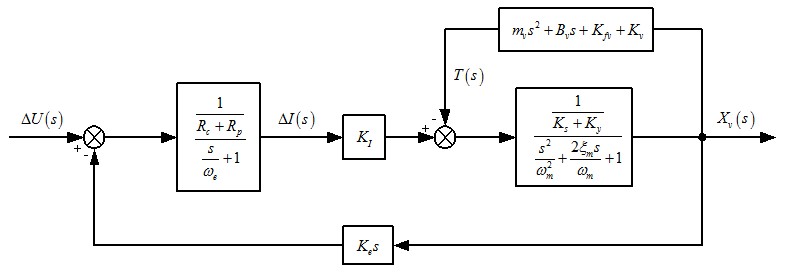
圖3 比例閥傳遞函數框圖















共0條 [查看全部] 網友評論