
對(duì)無人駕駛技術(shù)的向往,已經(jīng)讓人類付出了半個(gè)多世紀(jì)的努力與嘗試。盡管今天我們借助更先進(jìn)的傳感器、運(yùn)算速度更快的芯片、以及更準(zhǔn)確的深度學(xué)習(xí)算法,在一點(diǎn)一點(diǎn)接近完全無人駕駛的狀態(tài),但動(dòng)態(tài)時(shí)變的交通場(chǎng)景、復(fù)雜多樣的天氣狀況、隨機(jī)的交通參與者行為,都讓無人車上路面臨著無數(shù)的考驗(yàn)。在2018年2月2日舉行的國家智能產(chǎn)業(yè)峰會(huì)上,來自慧拓的高級(jí)工程師周銳與大家分享了一種全新的遠(yuǎn)程控制、虛實(shí)結(jié)合、人車協(xié)同的平行駕駛方案。據(jù)了解,平行駕駛是平行智能在智能駕駛中的實(shí)踐應(yīng)用。
這位從上世紀(jì)80年代就致力于無人車研究的美國教授,為何在上世紀(jì)90年代獲得正教授職稱、研制出能成功上路的無人車后,打道回“國”,轉(zhuǎn)而研究社會(huì)計(jì)算與知識(shí)自動(dòng)化?又因何提出“平行智能”的理論與方法?平行駕駛與當(dāng)下正火的無人駕駛,又有什么區(qū)別?
“Demo'97無人車展示比DAPRA挑戰(zhàn)賽對(duì)我的影響更大”
自動(dòng)駕駛真正走入公眾視野是從2004年的DARPA挑戰(zhàn)賽。那是2004年的3月13日,一大群工程師和數(shù)千名觀眾聚集在加州一家小酒吧外,聚精會(huì)神地注視著 15 輛參與莫哈維沙漠穿越賽的賽車“日暮沙漠陲,力戰(zhàn)煙塵里”。參賽車輛毫無例外都有著夸張的外形,賽車方向盤由電腦控制的。盡管最終沒有一輛參賽車完成142英里全程的賽事,卻也成為了啟蒙自動(dòng)駕駛行業(yè)的里程碑事件。“說起來我們還是最早把DARPA的這項(xiàng)軍用項(xiàng)目引入學(xué)術(shù)研究界的人”。2005年,IEEE 國際智能車會(huì)議在美國拉斯韋加斯舉行,作為大會(huì)主席的王飛躍教授邀請(qǐng)了DARPA挑戰(zhàn)賽項(xiàng)目負(fù)責(zé)人Ron Kurjanowicz做晚宴報(bào)告,向大家介紹項(xiàng)目最新進(jìn)展。

圖片來源于網(wǎng)絡(luò):https://zhuanlan.zhihu.com/p/30589595
然而,親身經(jīng)歷過這段無人車時(shí)代的王飛躍教授卻說,“早在此(2004年DAPRA挑戰(zhàn)賽)之前,就在1997年8月7-10號(hào),加州圣地亞哥舉行了名為Demo'97(The NAHSC 1997 Technical Feasibility Demonstration )的無人車集中演示,在我看來,那場(chǎng)演示的規(guī)模、意義以及在當(dāng)時(shí)所引起的影響比這場(chǎng)比賽更大。”當(dāng)時(shí)的情況是,美國國會(huì)在1991年通過了陸路復(fù)合運(yùn)輸效率法案(Intermodal Surface Transportation Efficiency Act, 簡稱為ISTEA冰茶法案),作為響應(yīng),聯(lián)邦高速公路管理局(FHSA)在1992年啟動(dòng)了一項(xiàng)全國性的自動(dòng)化公路研究項(xiàng)目。
Demo’97就是對(duì)該項(xiàng)目的成果展示,“其最大的目的是通過無人車輛編隊(duì)實(shí)現(xiàn)高速路交通優(yōu)化、在不增加現(xiàn)有道路的基礎(chǔ)上擴(kuò)大其通行容量,技術(shù)上主要通過在高速路面中嵌入磁條引導(dǎo)來實(shí)現(xiàn)”。有超過20款自動(dòng)駕駛汽車(包括小轎車、卡車、公共汽車)登場(chǎng)亮相Demo’ 97,其中大部分車輛來自GM通用,還有一些來自福特、本田等。大概有上千名的觀眾親身體驗(yàn)了完全自動(dòng)駕駛車輛在圣地亞哥I-15 HOV 車道上7.5英里的行駛演示;每輛車之間隔著一個(gè)車身的距離,主要示范了車輛換道、車隊(duì)加入以及車隊(duì)分離等功能[1]。

Demo’97的實(shí)拍圖
這場(chǎng)聲勢(shì)浩大的無人車展示必然離不開政府的支持。然而,“天真”的美國政府并沒有預(yù)料到這項(xiàng)計(jì)劃的花費(fèi),不到五年時(shí)間,9000萬美金的預(yù)算傾瀉一空,最終在90年代末被迫停止了這項(xiàng)計(jì)劃。缺少了政府的支持,汽車自主駕駛研究和應(yīng)用陷入低潮。“那時(shí)候的無人車政策幾乎就是零,后來底特律一些車企包括發(fā)明安全氣囊(airbag)和時(shí)任GM的通用汽車OnStar公司的CEO Dave Acton找到我們,大家一起花了很大精力到美國國會(huì)和聯(lián)邦交通部游說,最終美國政府推出了智能汽車(Intelligent Vehicle Initiative, IVI)的項(xiàng)目,最重要的考慮是安全——減少高速公路上由于車輛事故造成的死亡率,讓無人車的研究又復(fù)活了一段時(shí)間。”說到這兒,王教授長嘆了一口氣:“除了政策為零以外,那時(shí)網(wǎng)絡(luò)幾乎沒有,車內(nèi)通訊也沒有,電控當(dāng)時(shí)的車也不提供,比起今天來,困難太多了。”
“采礦作業(yè)自動(dòng)化,是無人車技術(shù)最合適最‘靠譜’的應(yīng)用領(lǐng)域之一”
王教授最早研究“移動(dòng)機(jī)器人”是在上世紀(jì)80年代,研制為外空間機(jī)器人系統(tǒng)的外空遠(yuǎn)程控制試驗(yàn)服務(wù)的室內(nèi)機(jī)器人,當(dāng)時(shí)從紐約上州租一條T1專線仿真地球火星通訊就需要幾十萬美元。后來到NASA在亞利桑那的空間資源利用中心,他還負(fù)責(zé)了外空間自動(dòng)工廠的設(shè)計(jì)與控制,當(dāng)時(shí)是為了更好地利用機(jī)器人來開發(fā)火星與月球資源。后來與美國標(biāo)準(zhǔn)與技術(shù)院(NIST)的Albus合作,研制了“SpiderRobot”無人車和通過Zircon制氫的無人生產(chǎn)過程。
“若不是當(dāng)年(1996年)民主黨的總統(tǒng)克林頓與共和黨的國會(huì)打架,導(dǎo)致我們火星項(xiàng)目預(yù)算不批、項(xiàng)目工資發(fā)不出來、被迫停止,研發(fā)出‘精神號(hào)’和‘挑戰(zhàn)號(hào)’火星車的就是我們。”談到這段往事,王教授有些無奈地笑起來“那時(shí)我必須在有現(xiàn)錢的Caterpillar礦山裝載車和無現(xiàn)錢的火星車之間選,最終選擇了礦山車”。就這樣他們把已經(jīng)“到手”的項(xiàng)目又還給了JPL(噴氣推進(jìn)實(shí)驗(yàn)室),選擇了有錢的Caterpillar大型野外裝載車(Wheel Loaders)的自動(dòng)化項(xiàng)目,該項(xiàng)目也成了王教授“基于代理的網(wǎng)絡(luò)控制”想法的起源。后來因他將分層智能控制理論和智能挖掘算法用于98T自動(dòng)裝載車并取得了非常好的效果,獲得了卡特彼勒技術(shù)發(fā)明獎(jiǎng);98年與同事合作完成了世界上第一本礦山自動(dòng)車的研究專著。
即便是現(xiàn)在,項(xiàng)目過后的20年,王教授依然認(rèn)為:“以挖掘、裝載和運(yùn)輸為主的采礦作業(yè)自動(dòng)化,是無人車技術(shù)最合適最‘靠譜’的一個(gè)應(yīng)用領(lǐng)域。礦山是一個(gè)相對(duì)封閉和結(jié)構(gòu)化的受控環(huán)境,加上對(duì)駕駛員的勞動(dòng)強(qiáng)度太高和工作環(huán)境太惡劣,特別適合無人車和機(jī)器人等人工智能技術(shù)的應(yīng)用。”
礦山車自然不能與民用車相比,在開放不受控的外部環(huán)境中,實(shí)現(xiàn)車輛的自主行駛。為了改善擁擠的交通狀況、降低車禍死亡率、讓無人駕駛技術(shù)造福千千萬萬的家庭,90年代末,他又帶領(lǐng)團(tuán)隊(duì)與亞利桑那州政府合作,研發(fā)了VISTA(Vehicles with Intelligent Systems for Transport Automation)自動(dòng)駕駛車。VISTA上路測(cè)試的當(dāng)天,在亞利桑那州甚至整個(gè)美國,都引發(fā)了極大的轟動(dòng)。因在該領(lǐng)域的杰出貢獻(xiàn),還獲得了亞利桑那州府給予的至高榮譽(yù)——“美國亞利桑那州杰出成就獎(jiǎng)”。
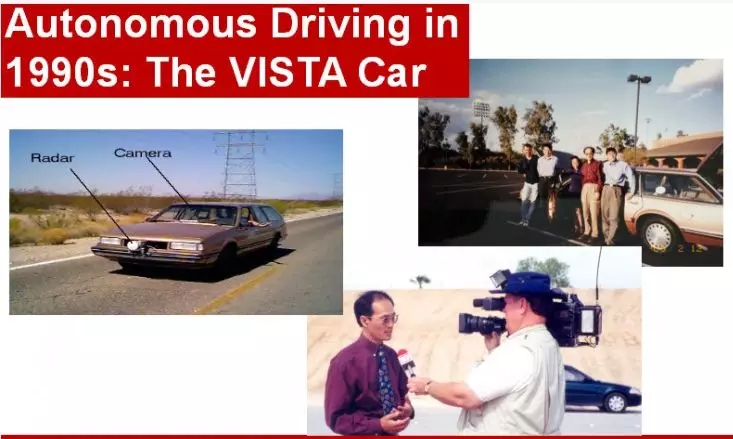
圖片來源于王飛躍教授于2015年10月在日本仙臺(tái)召開的"Global/
Local Innovations for Next Generation Automobiles"國際研討會(huì)上所做的工作介紹報(bào)告。
“如何利用有限的資源處理無限的性能需求?”
20世紀(jì)90年代末,Intel剛剛發(fā)布他們的Pentium系統(tǒng),其主頻只有120 Mhz。1997年4月,IBM的深藍(lán)(Deep Blue)計(jì)算機(jī),戰(zhàn)勝人類國際象棋世界冠軍卡斯帕羅夫,而當(dāng)時(shí)深藍(lán)的算法不過是暴力窮舉法,與現(xiàn)在Alpha Zero的計(jì)算能力和深度學(xué)習(xí)算法不可同日而語。再加上上世紀(jì)末,激光雷達(dá)在汽車上的應(yīng)用剛剛起步,不僅價(jià)格昂貴而且外觀龐大。在這種計(jì)算能力和硬件資源都很有限的條件下,如何利用好有限資源去實(shí)現(xiàn)真正的無人駕駛、保證對(duì)環(huán)境靈敏感知、確保安全行駛,是當(dāng)時(shí)王飛躍教授及團(tuán)隊(duì)思考的問題。如果單純的通過傳感器來堆砌車輛的安全,需要在車身周圍陣列數(shù)個(gè)攝像頭等傳感器,這些傳感器彼此之間的聯(lián)系,以及每秒中積累的數(shù)據(jù)都給車輛的行駛帶來困難(現(xiàn)在的很多公司仍在這么做)。裝滿傳感器的車輛像個(gè)插滿輸液管的病人,遇到雨雪天氣、信號(hào)干擾區(qū)、行人密集的地方,隨時(shí)都可能失控。王教授早就看破了這一點(diǎn),在一次演講中說:“我覺得應(yīng)該存在比目前這些自動(dòng)駕駛研究方向更好、更實(shí)用的方向……”
在解決有限資源滿足無限性能需求這個(gè)自動(dòng)駕駛難題的過程中,Agent(代理)技術(shù)出現(xiàn)給了王教授很大的靈感。在上世紀(jì)90年代,Agent是一個(gè)熱門話題,甚至被一些文獻(xiàn)稱為軟件領(lǐng)域下一個(gè)意義深遠(yuǎn)的突破。當(dāng)代人工智能的奠基人之一Marvin Minsky在1986年寫了一本《Society of Minds》,中文翻譯成《心智社會(huì)》,就是用代理,來闡述人類的復(fù)雜行為以及許多宏觀的社會(huì)現(xiàn)象是怎么通過非常簡單的個(gè)體行為交互機(jī)制逐漸演化形成的。一方面,Agent技術(shù)自底向上地為解決新的分布式應(yīng)用問題提供了有效途徑;另一方面,Agent技術(shù)通過對(duì)真實(shí)系統(tǒng)的元素建模、組合、計(jì)算,為全面準(zhǔn)確地研究分布計(jì)算系統(tǒng)的特點(diǎn)提供了合理的概念模型。
這一技術(shù)的出現(xiàn),加上早期在NASA/RPI空間探索智能機(jī)器人系統(tǒng)中心圍繞智能機(jī)器人、太空移動(dòng)無人機(jī)器人以及無人車的研究展開的大量工作經(jīng)驗(yàn),讓王飛躍教授萌生了“平行駕駛”的想法,他說:“當(dāng)時(shí)我們的本意是通過借助于Agent的想法,利用‘本地簡單、遠(yuǎn)程復(fù)雜’的思想把無人車技術(shù)充分利用起來,在網(wǎng)絡(luò)空間中再設(shè)計(jì)一個(gè)虛擬‘駕駛員’,使之變成輔助人類駕駛的平行在線‘軟件機(jī)器人’系統(tǒng),虛擬-實(shí)際平行跑。這樣一來,把簡單的決策放到‘車內(nèi)’,復(fù)雜的需要大量計(jì)算的情況放在‘車外’,就可以共享、整合有限的資源通過遠(yuǎn)程控制的方式更好地繼續(xù)完成無人車的研究。”這一想法提出后,為當(dāng)時(shí)很多陷入低潮的汽車自主駕駛研究和應(yīng)用尋找到了新的出路。
平行駕駛的想法曾在90年代末美國無人車VISTA的研制和數(shù)字試車場(chǎng)(Digital-Vehicle Proving Ground, DVPG)[2]的設(shè)計(jì)上,以及后來國內(nèi)“863”汽車電子重點(diǎn)項(xiàng)目“基于OSGi/VDX的嵌入式實(shí)時(shí)特定汽車應(yīng)用操作系統(tǒng)vASOS”中得以部分實(shí)施,但其方法的正式并完整提出卻是差不多十年后的2005年,即在第一屆IEEE汽車電子與安全(ICVES)國際會(huì)議上提出的基于網(wǎng)絡(luò)化智能代理、按照“車內(nèi)(Local)簡單、車外(Global)復(fù)雜”原理設(shè)計(jì)的平行駕駛系統(tǒng)。當(dāng)時(shí)還沒有云端的概念,解決方法是把復(fù)雜的部分放在一個(gè)中央的計(jì)算與控制中心里。
“研究無人駕駛,20世紀(jì)缺資源,21世紀(jì)缺場(chǎng)景數(shù)據(jù)”
進(jìn)入21世紀(jì),谷歌等互聯(lián)網(wǎng)巨頭的加入讓無人車研究看到了新的希望,隨著車輛計(jì)算能力和傳感器硬件進(jìn)一步的發(fā)展,無人駕駛迎來了蓬勃發(fā)展的春天。然而,盡管很多車企配備了高線束的激光雷達(dá)、先進(jìn)的計(jì)算平臺(tái)、能繪制出車道線級(jí)別的高精地圖,仍無法保證全場(chǎng)景下的自動(dòng)駕駛安全,實(shí)現(xiàn)量產(chǎn)更是遙遙無期。即便谷歌在今年年初推出了無人出租車業(yè)務(wù),也只在降雨量較少的鳳凰城等區(qū)域,特殊條件下還需要遠(yuǎn)程操縱。
對(duì)此,王教授似乎早就預(yù)料到了:“這是一個(gè)必然要經(jīng)歷的過程。從中國‘馬路’的叫法管中窺豹,我們可以得到一個(gè)啟示。以前中國把道路叫做‘馬路’,什么意思?很簡單,馬走的路。現(xiàn)在呢?馬上路是非法的(除了大連女騎警隊(duì)的馬),只能站在大卡車上上路。以前普通人家里都有馬車,現(xiàn)在誰能養(yǎng)得起馬?只有富人,一匹馬上千萬美元。唯一能見到馬的地方是什么地方?賽馬場(chǎng)。這就是人需要車的前提。現(xiàn)在老百姓家里面都有車了,但將來呢?我想將來有人駕駛的車也只有富人能買得起,有人駕駛車唯一上路的方式是停在大卡車上,唯一能開的地方是在賽車場(chǎng)。汽車剛剛出現(xiàn)的時(shí)候,它和馬車是一起上路的,車不能開得太快,太快把馬驚了可能就會(huì)引發(fā)事故。所以英國定了紅旗法案(Red Flag Act)說,汽車的速度每小時(shí)不能超過6公里。將來智能車要是按照它的方式,很可能會(huì)把有人駕駛的車“驚”了,跟馬“驚”了是一樣的。所以一定時(shí)期內(nèi),肯定是有人駕駛和無人駕駛車輛同時(shí)上路,因此我們也必須對(duì)無人車增加很多的限制。對(duì)于智能車來說,它開200公里/小時(shí)沒任何問題;人要開到200公里/小時(shí),不嚇到別人也把自己嚇到了。所以為了實(shí)現(xiàn)智能車的效率,智能車的速度,智能車的安全性,一定要把人‘趕’下去,否則它無法實(shí)現(xiàn)綠色、可持續(xù)、高效的目的。”
在王教授看來,未來幾年的交通會(huì)經(jīng)歷有人駕駛、無人駕駛、人機(jī)共駕等多種駕駛方式混合的時(shí)期。90年代研究智能汽車面臨的問題是計(jì)算資源有限,而現(xiàn)在面臨的是工程復(fù)雜性和社會(huì)復(fù)雜性會(huì)帶來巨大的建模鴻溝。“這個(gè)鴻溝一是靠數(shù)據(jù)填,要把小數(shù)據(jù)導(dǎo)成大數(shù)據(jù),把大數(shù)據(jù)提煉出來變成精準(zhǔn)知識(shí)即小規(guī)則,然后再指導(dǎo)車的駕駛,這就是平行。對(duì)于汽車來說,物理汽車跟軟件定義的汽車一起開,開的過程中產(chǎn)生數(shù)據(jù),通過計(jì)算實(shí)驗(yàn),變成駕駛的精準(zhǔn)知識(shí)——‘小知識(shí)’,而且產(chǎn)生嶄新的職業(yè),將來會(huì)有學(xué)習(xí)工程師、培訓(xùn)工程師、實(shí)驗(yàn)工程師、決策工程師。我們就是把司機(jī)換了一個(gè)地方,以前在車上開,現(xiàn)在是在操作辦公室開,讓無人車在上路之前,得到充分的‘教育’。”
國家自然基金委從2009年開始,每年舉辦一次中國智能車未來挑戰(zhàn)賽(China Intelligent Vehicle Challenge, IVFC),通過設(shè)計(jì)開放環(huán)境下的無人駕駛測(cè)試道路,為無人車在真實(shí)道路環(huán)境中學(xué)習(xí)、訓(xùn)練提供了很好的平臺(tái),到2018年已經(jīng)是第十屆。“無人駕駛測(cè)試場(chǎng)可以重現(xiàn)無人駕駛汽車使用中遇到的各種各樣道路條件,同時(shí)可用于驗(yàn)證和試驗(yàn)無人汽車的軟件算法的正確性。”王教授提到,為了讓無人駕駛的測(cè)試更專業(yè)更體系化,2015年8月,常熟市政府聯(lián)合西安交通大學(xué)、中國科學(xué)院自動(dòng)化研究所、長安大學(xué)和青島智能產(chǎn)業(yè)技術(shù)研究院在常熟高新技術(shù)產(chǎn)業(yè)開發(fā)區(qū)共建“中國智能車綜合技術(shù)研發(fā)與測(cè)試中心”(Intelligent Vehicles Proving Center of China,簡稱IVPC),由此實(shí)現(xiàn)了國內(nèi)無人駕駛測(cè)試中心零的突破。

VPC“九宮格”無人駕駛測(cè)試場(chǎng)地
“從2016年第八屆IVFC開始,我們?cè)黾恿诵碌碾x線測(cè)試環(huán)節(jié),通過模擬真實(shí)的交通場(chǎng)景來增強(qiáng)機(jī)器學(xué)習(xí)的手段讓無人車進(jìn)行模擬學(xué)習(xí),不僅效率高,而且安全。”離線測(cè)試是在真實(shí)道路交通場(chǎng)景數(shù)據(jù)庫的基礎(chǔ)上,通過仿真環(huán)境評(píng)估無人駕駛車輛的基本認(rèn)知能力。利用車載相機(jī)獲取真實(shí)道路視頻圖像構(gòu)建交通場(chǎng)景數(shù)據(jù)庫(包括光照、道路類型及車輛運(yùn)動(dòng)等動(dòng)態(tài)變化情況),評(píng)估無人駕駛車輛檢測(cè)車道線、交通信號(hào)、前方車輛等基本認(rèn)知能力的有效性、實(shí)時(shí)性和適應(yīng)性。為了構(gòu)建更多樣、更完備、更復(fù)雜的測(cè)試數(shù)據(jù)集,近兩年王飛躍教授帶領(lǐng)團(tuán)隊(duì)先后提出了平行視覺[3]、平行圖像[4]、平行數(shù)據(jù)[5]、平行感知[6]、平行學(xué)習(xí)[7]、平行駕駛[8]、平行測(cè)試[9]等方法,本質(zhì)還是利用虛擬空間無限的可能性來彌補(bǔ)實(shí)際數(shù)據(jù)、實(shí)際交通場(chǎng)景、實(shí)際駕駛狀況的不完備。
“虛實(shí)結(jié)合,平行駕駛,最終統(tǒng)一L0到L5六個(gè)階段”
2015年,王飛躍教授在報(bào)告中第一次結(jié)合ACP平行系統(tǒng)理論與機(jī)器人學(xué), 提出平行機(jī)器人的概念, 提出將機(jī)器人從CPS空間推向CPSS空間, 從服務(wù)機(jī)械制造的物理機(jī)器人演化成為同時(shí)服務(wù)于知識(shí)工作的平行機(jī)器人。作為一種輪式機(jī)器人的無人駕駛汽車,同樣可以在CPSS(Cyber-Physical-Social Systems)的理論框架下,將駕駛員、車輛、信息這幾個(gè)組成部分,擴(kuò)展對(duì)應(yīng)到通過物理空間和信息空間耦合交互的三個(gè)世界:物理世界、心理世界和人工世界,形成了基于CPSS理論的平行駕駛。
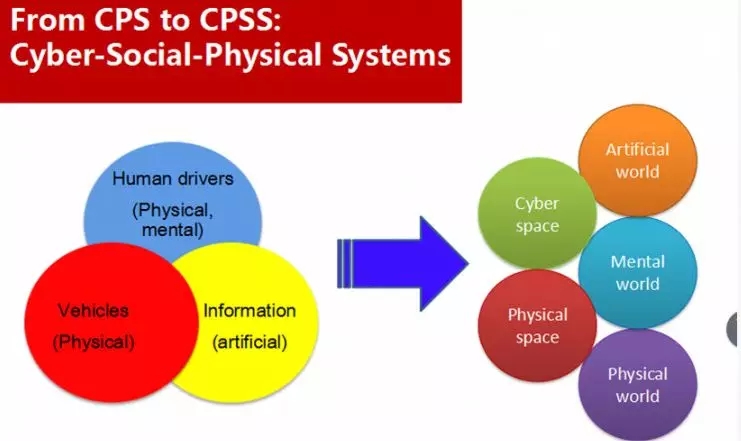
從CPS到CPSS的跨越
“無人自主駕駛這三個(gè)圈(駕駛員、車和信息),在技術(shù)方面能夠從這三個(gè)圈擴(kuò)展到五個(gè)圈,那如何來擴(kuò)展,一定是把物理空間和網(wǎng)絡(luò)空間打通,從單個(gè)車的智能到聯(lián)網(wǎng)的、群體的車之智能。要跳出CPS,邁向CPSS,以后每個(gè)人開車不僅僅是在物理世界,同時(shí)還在心理世界和人工世界。未來一定是平行交通、平行道路、平行駕駛。物理的汽車跟軟件定義的汽車要平行起來,物理的公路要跟軟件定義的公路合起來。”
在王教授構(gòu)想的平行駕駛理論中,當(dāng)人類司機(jī)駕著真實(shí)車奔馳時(shí),作為“軟件機(jī)器人”的智能代理也開著對(duì)應(yīng)的“虛擬車”同時(shí)在虛擬世界中奔馳。這種虛擬車,學(xué)術(shù)上稱為“人工車”或“軟件定義的車”,根據(jù)不同的要求在不同的程度上與真實(shí)車一一對(duì)應(yīng)。而且,一部真實(shí)車可以有多部虛擬車與之相伴,有的隨車而行,有的存于家中、辦公室、服務(wù)中心、廠家或政府的檔案機(jī)構(gòu),或者各式各樣的網(wǎng)絡(luò)云端服務(wù)平臺(tái)之中。利用這種方式,虛擬車可以用可視化的形式提供真實(shí)車的本體知識(shí)、歷史情況和實(shí)時(shí)信息;同時(shí)提供預(yù)測(cè)未來狀態(tài)和情境的計(jì)算能力或檢查事故原因的回溯計(jì)算功能;最終,還可以虛實(shí)互動(dòng),提供監(jiān)視、控制、管理、服務(wù)真實(shí)車的各類功能。顯然,這種智能汽車技術(shù)的發(fā)展與應(yīng)用前景幾乎是無限的。
“在未來從L0-L5六個(gè)階段共存的場(chǎng)景中,我們需要一個(gè)無限安全的性能要求,就需要去預(yù)測(cè)車輛行為,這將是一個(gè)龐大的計(jì)算量。現(xiàn)有的計(jì)算能力仍很有限,無法在本地進(jìn)行計(jì)算,需要在云端進(jìn)行復(fù)雜的計(jì)算,同時(shí)在云端進(jìn)行學(xué)習(xí)。有些車開得好,有些智能車做得比較差,就會(huì)在云端以好的方式讓差的無人車進(jìn)行學(xué)習(xí),最后達(dá)到比較安全、比較智能的這樣一種出行方式。”
“平行駕駛毫無疑問是我們最先提出來的”
這種平行駕駛的構(gòu)想并沒有只停留在概念上,從2007年開始,王飛躍教授正式組織團(tuán)隊(duì)開始了平行駕駛相關(guān)研究。從2009年在蘇州成立派爾公司到現(xiàn)在的慧拓智能機(jī)器公司,都是平行駕駛的堅(jiān)定踐行者。
第九屆中國智能車未來挑戰(zhàn)賽上,慧拓智能機(jī)器公司聯(lián)合中國科學(xué)院自動(dòng)化研究所、清華大學(xué)、西安交通大學(xué)研發(fā)了虛實(shí)結(jié)合的無人駕駛車輛平行測(cè)試平臺(tái)。通過建立實(shí)際測(cè)試場(chǎng)地和任務(wù)的精確監(jiān)控系統(tǒng),利用高精度地圖和高精度差分GPS記錄車輛動(dòng)態(tài)數(shù)據(jù),通過車內(nèi)和車外的視頻監(jiān)控采集駕駛環(huán)境數(shù)據(jù),基于4G和V2X通訊實(shí)時(shí)傳輸這些監(jiān)控?cái)?shù)據(jù),在云平臺(tái)儲(chǔ)存和分析數(shù)據(jù)和評(píng)測(cè)任務(wù)的執(zhí)行情況。在這些數(shù)據(jù)的基礎(chǔ)上,便捷地建立了虛擬測(cè)試空間和任務(wù)。通過虛擬測(cè)試和實(shí)際測(cè)試的互動(dòng),不斷迭代更新,提高虛擬測(cè)試中Agent行為的真實(shí)性,更好的擬合人類駕駛員、行人等和受試車輛互動(dòng)行為。通過2017年中國智能車未來挑戰(zhàn)賽中首次實(shí)戰(zhàn)應(yīng)用,虛實(shí)結(jié)合的無人駕駛車輛平行測(cè)試平臺(tái)的優(yōu)勢(shì)已經(jīng)得到了充分的體現(xiàn)。

目前國內(nèi)做平行駕駛的只有慧拓智能機(jī)器公司,近兩年國外MIT和豐田也開始提“平行駕駛”的概念,對(duì)此,王教授說:“MIT的平行自動(dòng)駕駛也好,還是一些做平行測(cè)試、平行自動(dòng)化的公司也好,關(guān)于平行駕駛、軟件定義的車,毫無疑問是我們最先提出來的。我也希望更多人加入到平行駕駛的研究中,這是一條可行的道路,大家共同攜手早日實(shí)現(xiàn)未來更加安全、便捷的出行計(jì)劃。”
對(duì)于未來的構(gòu)想,王飛躍教授認(rèn)為:“隨著智能技術(shù)的發(fā)展,無論汽車是有人還是無人駕駛,其智能水平都將不斷提升。或許,汽車真將成為帶輪子的智能計(jì)算機(jī)、iPhone、甚至智能移動(dòng)辦公室或生活空間。可問題是,這一天何時(shí)到來、又如何實(shí)現(xiàn)?一些虛擬測(cè)試技術(shù)的盛行,揭示了虛實(shí)互動(dòng)的平行方式是駛向未來智能社會(huì)的可行和有效途徑。相信未來的智能車每一部都會(huì)有形影不離的“i車”相隨,將是虛實(shí)互聯(lián)、互通、互動(dòng)的平行車,即,平行車= 車+ i車或者平行車= 車+ i車1+ +車2+ ……. + i車n
或許,將來廠家的每一個(gè)產(chǎn)品都必須有對(duì)應(yīng)的“i產(chǎn)品”,形成平行產(chǎn)品;社會(huì)上的每一個(gè)人更要有對(duì)應(yīng)的”i人”與之相伴相生,形成平行人;最終,構(gòu)成平行社會(huì)。”
參考文獻(xiàn)
[1] Christopher Nowakowski and Steven E. Shladover, Answering the Challenges of Regulating Automated Vehicle Testing and Development in California, Intellimotion, 2014, 19(1): 1-9.
[2] Fei-Yue Wang, Xiaojing Wang, Li Li,P. B. Mirchandani, “Creating a Digital Vehicle Proving Ground”, IEEE Intelligent Systems, 2003, Vol. 18, No. 2, pp. 12-15.
[3] 王坤峰, 茍超, 王飛躍, “平行視覺:基于ACP的智能視覺計(jì)算方法”, 自動(dòng)化學(xué)報(bào), 2016, Vol. 42, No. 10, pp. 1490-1500.
[4] 王坤峰, 魯越, 王雨桐, 熊子威, 王飛躍. 平行圖像: 圖像生成的一個(gè)新型理論框架. 模式識(shí)別與人工智能, 2017, vol. 30, No. 7, pp. 577−587.
[5] 劉昕, 王曉, 張衛(wèi)山, 汪建基, 王飛躍, “平行數(shù)據(jù): 從大數(shù)據(jù)到數(shù)據(jù)智能”, 模式識(shí)別與人工智能, 2017, Vol. 30, No. 8, pp. 673-681.
[6] 孟祥冰,王蓉,張梅,王飛躍, “平行感知: ACP 理論在視覺SLAM 技術(shù)中的應(yīng)用”, 指揮與控制學(xué)報(bào), 2017, Vol. 3, No. 4, pp. 350-358.
[7] 李力, 林懿倫, 曹東璞, 鄭南寧, 王飛躍, “平行學(xué)習(xí)| 機(jī)器學(xué)習(xí)的一個(gè)新型理論框架”, 自動(dòng)化學(xué)報(bào), 2017, Vol. 43, No. 1, pp. 1-8.
[8] Fei-Yue Wang, “Parallel Driving With Software Vehicular Robots for Safety and Smartness”, IEEE Transactions on Intelligent Transportation Systems, Aug., 2014, Vol. 15, No. 4, pp. 1381-1387.
[9] Li Li, Wu-Ling Huang, Yuehu Liu, Nan-Ning Zheng, Fei-Yue Wang, “Intelligence Testing for Autonomous Vehicles: A New Approach”, IEEE Transactions on Intelligent Vehicles, June. 2016, Vol.1, No.2, pp. 158-166.















共0條 [查看全部] 網(wǎng)友評(píng)論