6.1 變頻器壓頻比的正確設置
6.1.1 變頻器壓頻比
由于通用變頻器一般采用U/F(變頻器的壓頻比由變頻器的基準電壓與基準頻率兩項功能參數的比值決定,即基準電壓/基準頻率=壓頻比)控制,即采用變壓變頻(VVVF)方式調速,因此,變頻器在使用前正確地設置壓頻比,對保證變頻器的正常工作至關重要。
U/F是指變頻器運行時,變頻器輸出電壓和輸出頻率之比,它是變頻器最常用最簡單的控制方式。U與F的比例關系是考慮了電機特性而預先決定的,通常在控制器的存儲裝置(ROM)中存有幾種特性,可以用變頻器的內部設定參數進行選擇。
保持U/F比恒定控制是異步電機變頻調速的最基本的控制方式,它在控制變頻器輸出電源頻率變化的同時控制變頻器輸出的電壓,并使二者之比U/F為恒定,從而使電機的磁通保持恒定。在電機額定運行情況下,電機的定子電阻和漏抗的電壓降比較小,電機的端電壓和電機的感應電勢近似相等。
U/F比恒定控制存在的主要問題是低速性能較差,其原因是低速時異步電機定子電阻電壓降所占比例變大,已不能忽略,不能再認為電機定子電壓和電機感應電勢近似相等,仍按U/F比一定控制已不能保持電機磁通恒定。電機磁通的減小必然造成電機的電磁轉矩減小;另外變頻器功率器件的死區時間也是影響電機低速性能的重要原因,死區時間造成電壓下降同時還會引起轉矩脈動,在一定條件下還會引起轉速、電流的振蕩。
U/F比恒定控制常用于通用變頻器上。這類變頻器主要用于風機、水泵的調速功能,以及對調速范圍要求不高的場合。U/F比恒定控制的突出優點是可以進行電機的開環速度控制。
6.1.2 基頻參數設置
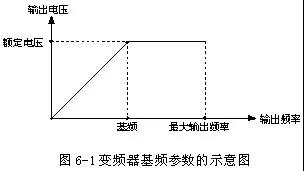
變頻器基頻參數的示意圖如圖6-1所示,基頻以下,變頻器的輸出電壓隨輸出頻率的變化而變化,U/F=常數,適合恒轉矩負載特性。基頻以上,變頻器的輸出電壓維持電源額定電壓不變,適合恒功率負載特性。
基頻參數設置應該以負載的額定參數設置,而不能根據負載特性設置,若負載為電動機即使電動機選型不適合負載特性,也必須盡量遵循電動機的參數,否則,電動機容易過流或過載。例如:電動機的額定工作頻率為50Hz,基頻應設置為50Hz;如果電動機的額定工作頻率為60Hz,基頻應設置為60Hz;如果電動機的額定工作頻率為100Hz,基頻應設置為100Hz。
如果電動機選擇專用的交流變頻電動機,電動機一般都標注恒轉矩、恒功率調速范圍。如果標注5~100Hz為恒轉矩,100~150Hz為恒功率,基頻應該設置為100Hz。
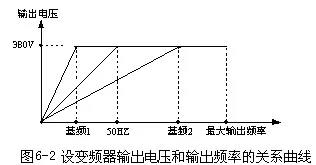
基頻參數直接反映變頻器輸出電壓和輸出頻率的關系,如果設置不當容易造成負載的過流或過載。例如一臺交流電動機的額定工作頻率為50Hz,額定電壓380V。如果變頻器的基頻設置低于50Hz,如圖6-2中的基頻1,U/F比例高,同等頻率的輸出電壓高,輸出電流高,在啟動時,容易造成過流。如果變頻器的基頻設置高于50Hz,如圖6-3中的基頻2,U/F比例低,同等頻率的輸出電壓低,輸出電流低,在啟動時,容易造成無法啟動而過載。

如果負載在低速時的轉矩較大,而轉矩補償(U/F比)預置得較小,則低速時帶不動負載。反之,如果負載在低速時的轉矩較輕而轉矩補償(U/F比)預置得較大,則補償過分,低速時電動機的磁路將飽和,勵磁電流發生畸變,嚴重時會因勵磁電流峰值過高而導致“過電流”跳閘。
調試時,U/F比的預置宜由小逐漸加大,每加大一檔,觀察在最低頻時能否帶得動負載,還應觀察空載時會不會跳閘。一直調整到在最低頻率下運行時,既能帶得動負載,又不會空載跳閘時為止。
6.1.3 基頻設置的注意事項
U/F類型的選擇包括最高頻率、基本頻率和轉矩類型等。最高頻率是變頻器、電動機可以運行的最高頻率。由于變頻器自身的最高頻率可能較高,當電動機容許的最高頻率低于變頻器的最高頻率時,應按電動機及其負載的要求進行設置。
基本頻率是變頻器對電動機進行恒功率控制和恒轉矩控制的分界線,應按電動機的額定電壓設置。轉矩類型指的是負載是恒轉矩負載還是變轉矩負載。應根據變頻器使用說明書中的U/F類型圖和負載的特點,選擇其中的一種類型。如恒轉矩負載,即速度變化轉矩恒定,如運輸機械類,U/F曲線應設置為恒定特性。若變轉矩負載,如泵、通風機等負載,U/F應設置成平方律遞減特性(轉矩以速度的平方變化的負載)。例如根據電動機的實際情況和實際要求,將最高頻率設置為83.4Hz,基本頻率設置為工頻50Hz。負載類型:50Hz以下為恒轉矩負載,50~83.4Hz為恒功率負載。
基準電壓與基準頻率參數的設置,不僅與電動機的額定電壓與額定頻率有關(電動機的壓頻比為電動機的額定電壓與額定頻率之比),而且還必須考慮負載的機械特性。對于普通異步電動機在一般調速應用時,其基準電壓與基準頻率按出廠值設置(基準電壓380V,基準頻率50Hz),即能滿足使用要求。但對于某些行業使用較特殊的電動機,就必須根據實際情況重新設置基準電壓與基準頻率的參數。
電動機采用變頻器調速時有兩種情況:基頻(基準頻率)以下調速和基頻以上調速。在壓頻比設置時必須考慮的重要因素是:盡量保持電動機主磁通為額定值不變。如果磁通過弱(電壓過低),電動機鐵心不能得到充分利用,電磁轉矩變小,帶負載能力下降。如果磁通過強(電壓過高),電動機處于過勵磁狀態,電動機因勵磁電流過大而嚴重發熱。
(1)基頻以下調速
為了充分利用鐵心材料,一個重要的因素是希望保持每極磁通量為額定值不變。磁通太弱,沒有充分利用,造成浪費。磁通過大又會使鐵心飽和,則勵磁電流劇增,繞組過分發熱,功率因數降低,甚至損壞電機。所以在調頻時希望能保持磁通恒定。即實現恒磁通變頻調速,這樣,調速時才能保持電機的最大轉矩不變。對于他勵直流電機,因勵磁系統是獨立的,只要對電樞反應的補償合適,保持Φm不變很容易做到。對于三相異步電機,定子每相電動勢的有效值是:
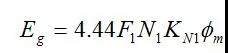
式中:N1為定子每相繞組串聯匝數;KN1為基波繞組系數;Φm為每極氣隙磁通,Wb;Eg為氣隙磁通在定子每相繞組中感應電動勢的有效值,V;F1為定子電源頻率,Hz。
由此可得:
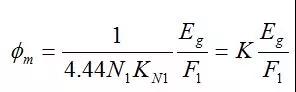
上式表明,為了保持Φm不變,在改變電源頻率f1的同時,必須按比例改變感應電動勢Eg,才能有效地利用鐵心。在一定調速范圍內維持磁通恒定,在相同的轉矩相位角的條件下,如果能夠控制電機的電流為恒定,即可控制電機的轉矩為恒定,稱為恒轉矩控制,即電機在速度變化的動態過程中,具有輸出恒定轉矩的能力。由于恒定U1/F1控制能在一定調速范圍內近似維持磁通恒定,因此恒定U1/F1控制屬于恒轉矩控制。要保持Φm不變,當頻率F1變化時,必須同時改變電動勢Eg的大小,使Eg/F1=常值,即采用恒定電動勢與頻率比的控制方式(恒定Eg/F1控制)。因電機定子電壓為
U1=Eg+(r1+jx1)I1
式中:U1為定子電壓,r1為定子電阻,x1為定子漏磁電抗,I1為定子電流。
如果在電壓、頻率協調控制中,適當地提高電壓U1,使它在克服定子阻抗壓降以后,能維持Eg/F1為恒值,則無論頻率高低,每極磁通Φm均為常值,就可實現恒定Eg/F1控制。
由于電機的感應電勢檢測和控制比較困難,恒定Eg/F1控制的穩態性能優于下面講的恒定U1/F1控制,它正是恒定U1/F1控制中補償定子壓降所追求的目標。在電機正常運行時,由于電機定子電阻r1和定子漏磁電抗x1的壓降較小,可以忽略,則電機定子電壓U1與定子感應電動Eg近似相等,即:U1≈Eg,則得U1/F1=常值,因此可以通過控制U1/F1恒定,以保持氣隙磁通基本恒定。恒定U1/F1控制是異步電機變頻調速的最基本控制方式,它在控制電機的電源頻率變化的同時控制變頻器的輸出電壓,并使二者之比U1/F1為恒定,從而使電機的磁通基本保持恒定。
恒定U1/F1控制的出發點是電機的穩態數學模型,它的控制效果只有在穩態時才符合要求。在過渡過程中,電機所產生的轉矩需要按照電機的動態數學模型進行分析計算。因此恒定U1/F1控制的電機系統難以滿足動態性能的要求。在啟動時,為了使系統能滿足穩態運行的條件,頻率的變化應盡可能緩慢,以避免電機出現失速現象,即電機轉子的轉速與旋轉磁場的轉速相差很大。滑差增大,造成電機中流過很大的電流,電機輸出的轉矩將減小。
恒定U1/F1控制最容易實現,它的變頻機械特性基本上是平行下移,硬度也較好,能夠滿足一般的調速要求,突出優點是可以進行電機的開環速度控制。
恒定U1/F1控制存在的主要問題是低速性能較差。這是由于低速時異步電機定子電阻壓降所占比重增大,已不能忽略,電機的電壓和電勢近似相等的條件已不滿足,仍按U1/F1恒定控制已不能保持電機磁通恒定。電機磁通的減小,電機電磁轉矩的減小。因此,在低頻運行的時候,要適當的加大U1/F1的值,以補償定子壓降。
若采用開環控制,則除了定子漏阻抗的影響外,變頻器橋臂上下開關元件的互鎖時間也是影響電機低速性能的重要原因。對電壓型變頻器,考慮到電力半導體器件的導通和關斷均需一定時間,為防止上下元件在導通/關斷切換時出現直通,造成短路而損壞,在控制導通時設置一段開關導通延遲時間。在開關導通延遲時間內,橋臂上下電力半導體器件均處于關斷狀態,因此又將開關導通延遲時間稱為互鎖時間。互鎖時間的長短與電力半導體器件的種類有關。由于互鎖時間的存在,變頻器的輸出電壓將比控制電壓低。在低頻的時候,變頻器的輸出電壓比較低,PWM逆變脈沖的占空比比較小,這時互鎖時間的影響就比較大,從而導致電機的低速性能降低。互鎖時間造成的壓降還會引起轉矩脈動,在一定條件下將會引起轉速、電流的振蕩,嚴重時變頻調速系統不能運行。
如果把電壓、頻率協調控制中的電壓U1進一步再提高一些,把轉子漏抗上的壓降也抵消掉,便的到恒定Er/F1控制,其機械特性是一條直線。顯然,恒定Er/F1控制的穩態性能最好,可以獲得和直流電機一樣的線性機械特性。這正是高性能交流變頻調速所要求的性能。當頻率恒定時,電動勢與磁通成正比。氣隙磁通Eg的感應電動勢對應于氣隙磁通Φm,那么,轉子磁通的感應電動勢Er就應該對應于轉子磁通Φr
Er=4.44F1N1KN1Φr
由此看見,只要能夠按照轉子磁通Φr=恒值進行控制,就可獲得恒定Er/F1控制。這正是矢量控制系統所遵循的原則。在頻率低于供電的額定電源頻率時屬于恒轉矩調速,但是在頻率較低時,定子漏阻抗壓降已不能忽略,因此要人為地提高定子電壓,以作漏抗壓降的補償,維持Eg/F1≈常數,此時變頻器輸出U1/F1系如圖6-4中的曲線2,而不再是曲線1。
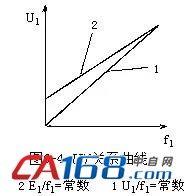
多數變頻器在頻率低于電機額定頻率時,輸出的電壓U1和頻率F1類似圖6-4中曲線2,并且隨著設置不同而改變補償曲線的形狀,使用時要根據實際電機運行情況調整。
(2)基頻以上調速
當電機的電壓隨著頻率的增加而升高時,若電機的電壓已達到電機的額定電壓,繼續增加電壓有可能破壞電機的絕緣。為此,在電機達到額定電壓后,即使頻率增加仍維持電機電壓不變。這樣,電機所能輸出的功率由電機的額定電壓和額定電流的乘積所決定,不隨頻率的變化而變化。
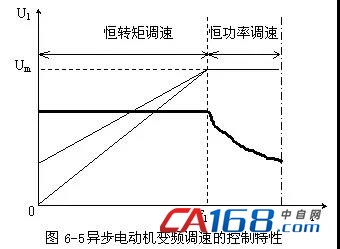
在基頻以上調速時,頻率可以從基頻往上增加,但電壓卻不能超過額定電壓,此時,電機調速屬于恒轉矩調速。電機在恒轉矩調速時,磁通與頻率成反比地降低,相當于直流電機弱磁升速的情況。把基頻以下和基頻以上兩種情況結合起來,可得圖6-5所示的異步電機變頻調速的控制特性。如果電機在不同轉速下都具有額定電流,則電機都能在溫升允許的條件下長期運行,這時轉矩基本上隨磁通變化;按照電力傳動原理,在基頻以下,屬于“恒轉矩調速”的性質,而在基頻以上,基本上屬于“恒功率調速”。
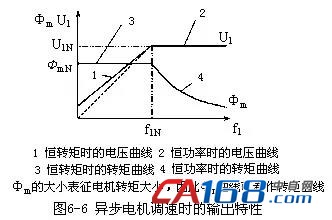
此時變頻器的輸出頻率F1提高,但變頻器的電源電壓由電網電壓決定,不能繼續提高。根據公式(1-6),Eg不能變,F1提高必然使Фm下降,由于Фm與電流或轉矩成正比,因此也就使轉矩下降,轉矩雖然下降了,但因轉速升高了,所以它們兩的乘積并未變,轉矩與轉速的乘積表征著功率。因此這時候電機處在恒功率輸出的狀態下運行。異步電機變頻調速恒轉矩和恒功率區域狀態的特性如圖6-6所示。
由以上分析可知通用變頻器對異步電機調速時,輸出頻率和電壓是按一定規律改變的,在額定頻率以下,變頻器的輸出電壓隨輸出頻率升高而升高,即所謂變壓變頻調速(VVVF)。
實際上多數變頻調速場合是用于額定頻率以下,低頻時采用的補償都是為了解決低頻轉矩的下降,其采用的方式多種多樣。有矢量控制技術,直接轉矩控制技術以及擬超導技術等。其作用不外乎動態地改變低頻時的變頻器輸出電壓、輸出相位或輸出頻率,也就是利用電路和計算機技術,實時地而不是固定地改變圖6-6中曲線1的形狀達到低速時力矩提升,并且穩定運行,又不至于電流太大而造成故障。基頻以上頻器的輸出電壓維持電源額定電壓不變,適合變頻調速系統的恒功率負載特性。
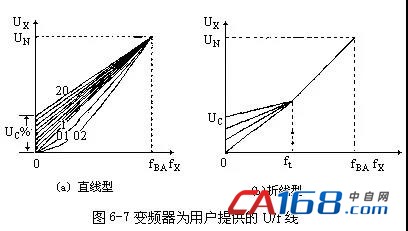
因為每臺變頻器應用到什么負載上是不確定的,而不同負載在低頻時對U/F比的要求又很不一致。為此,各種變頻器在U/F控制模式下,提供了任意預置U/F比的功能。使用戶可以根據電機在低速運行時負載的輕重來選擇U/F比,如圖6-7所示。















共0條 [查看全部] 網友評論