第四章 電力拖動拾遺
4.1 力矩電動機調速
開發背景
1981 年,宜昌市塑料扁絲織袋廠引進全套日本設備,我被任命為消化小組組長,進駐該廠。日本設備中,力矩電動機用得較多,用法較簡潔。其調壓方法主要用晶閘管。1988 年,我們在為河南某電機廠配置力矩電動機調速裝置時,改用PWM 技術控制功率晶體管,取得了成功。
4.1.1 力矩電動機簡介
4.1.1.1 構造與機械特性
1. 構造特點
力矩電動機,也稱高轉差率電動機,其構造和普通的籠形異步電動機完全相同,只是,其轉子繞組是用高電阻材料構成的。
2. 機械特性
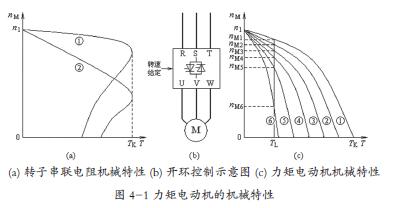
繞線轉子異步電動機在轉子回路里串聯電阻后,機械特性的特點是:臨界轉矩不變,臨界轉速下降,如圖4-1(a)所示。
力矩電動機在本質上是和繞線轉子異步電動機在轉子回路里串聯電阻是相同的,所以其機械特性的特點也類似,只是轉子繞組的電阻值更大,臨界點可移至橫坐標以下,其自然機械特性如圖4-1(c) 中之曲線①所示。
4.1.1.2 力矩電動機的調速
1. 開環調速
如圖4-1(b) 所示,在負載轉矩不變的前提下,電壓越低,電動機的轉差越大,轉速越低。所以,調節三相電源的電壓,就可以得到不同的轉速,如圖4-1(c) 中之nM1、nM2、…nM6 所示。
由于電動機的臨界轉速很低,在降低電壓的情況下,得到的機械特性如曲線②、③、④、⑤、⑥所示。很明顯,這些機械特性都很軟,負載轉矩變化時,轉速的變化很大,運行是不夠穩定的。


2. 閉環調速
實際使用時,都把控制電路聯接成閉環控制系統,如圖4-2(a) 所示,圖中,SS 是速度傳感器,用于將轉速信號反饋到轉速給定電路。舉例說,負載轉矩等于TL1 時,工作點在曲線③上的A 點,轉速是nM1。當負載轉矩增大為TL2時,工作點將下移至B 點,轉速降至nM2。這時,由于轉速反饋的結果,使轉速控制器的輸出電壓升高,電動機的機械特性變為曲線②,工作點跳轉到曲線②的C 點,轉速又上升為nM1,可以看出,通過轉速反饋,可以得到如曲線a、b、c、d、e 那樣的較硬的機械特性,從而擴展了它的用途。
4.1.2 調壓控制的主電路
4.1.2.1 三相可控調壓
1. 通用接法
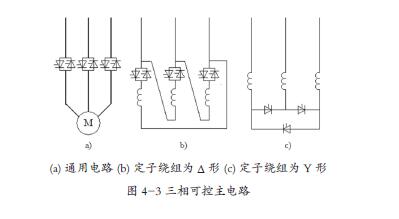
在三相電源進線處,每相都串聯一個雙向晶閘管,如圖4-3(a) 所示。
此方法的缺點是,定子繞組里將存在高次諧波電流,則:
(1) 當定子繞組為Δ 形時高次諧波電流的零序分量將在繞組里形成環流;
(2) 當定子繞組為Y 形時因為沒有中線,所以高次諧波電流的零序分量為零,但中點存在著位移電壓。所以,在實際應用中,此法不宜采用。
2. 定子繞組為Δ 形接法
把雙向晶閘管和各相繞組串聯后再聯接成Δ 形,從而避免了形成環流的可能性,如圖4-3(b) 所示。
3. 定子繞組為Y 形接法
把各相繞組的尾端,由單向晶閘管作環形聯接,從而有效地避免了零序分量的影響,如圖4-3(c) 所示。
4.1.2.2 單相異步電動機的回顧
1. 單相電動機的磁場
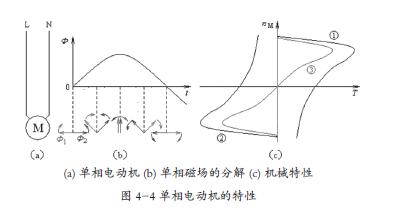
單相電動機的磁場是脈動磁場,如圖4-4 所示,它可以分解成兩個方向相反而相同的旋轉磁場,如圖4-4(b) 所示。
2. 單相電動機的電磁轉矩
如果只有一個旋轉磁場,則所得到的機械特性將分別如圖4-4(c) 中的曲線①和曲線②所示。當兩個旋轉磁場同時作用時,所得到的機械特性如圖中之曲線③所示。
3. 單相電動機的工作特點
單相電動機在靜止狀態下,是沒有電磁轉矩的。但一旦向某一方向有了一點轉速后,它就能旋轉起來,旋轉方向由初始方向決定。實際的單相電動機總要設置一個能夠產生附加轉矩的裝置使之產生起動轉矩。
4.1.2.3 一相調壓的調速方案
1. 一相調壓的調速原理
在U 相中接入雙向晶閘管,如圖4-5(a) 所示。則U 相中將通入少量電流,電動機的合成磁場將是橢圓旋轉磁場,如圖4-5(b) 所示。
這時,力矩電動機的機械特性如圖中之曲線①、曲線②和曲線③所示。
通過調節雙向晶閘管的導通角,就可以調節U 相電流的大小,從而得到不同橢圓度的旋轉磁場,也就得到不同的機械特性曲線。由于雙向晶閘管導通角的調節是無級的,所以,力矩電動機可以實現無級調速。
2. 一相調壓的脈寬調制
二十世紀八十年代,大功率晶體管以及脈寬調制技術開始普及,于是出現了利用脈寬調制技術來調節電壓的控制方案。
一相調壓的脈寬調制電路如圖4-6(a) 所示。
當輸入電壓為上“+”下“-”時,電流的路徑是:“+”→ VD1 → VT → VD2 →“-”;
當輸入電壓為下“+”上“-”時,電流的路徑是:“+”→ VD3 → VT → VD4 →“-”。
可見,不論電源電壓的方向如何,都必須通過晶體管VT,因此,改變VT 的脈沖占空比,就能改變U 相電流的大小,從而調節電動機的轉速。
當脈沖序列的占空比較大時,輸出的平均電壓也較大,如圖4-6(b) 所示;反之,當脈沖序列的占空比較小時,輸出的平均電壓也較小,如圖4-6(c) 所示。

4.2 滑差電動機的機械特性
講解背景
在變頻調速技術普及推廣之前,滑差電動機由于能夠無級調速,在紡織、塑料等行業中,應用得十分廣泛。但對于其機械特性,卻很少有比較詳細的論述。筆者因曾經消化過日本設備中的電力拖動部分,并仿制過日本滑差電動機的控制器。時至今日,其控制電路已經過時,今僅就其機械特性作一探討。
4.2.1 滑差電動機的構造和原理
4.2.1.1 滑差電動機的構造
滑差電動機也叫電磁調速電動機,其基本結構原理如圖4-7 所示,它相當于兩級異步電動機。
1. 第一級電動機
第一級電動機就是拖動電動機1,也是原動機。
2. 第二級電動機
第二級也叫轉差離合器,由電樞2 和磁極4 構成,兩者都能旋轉。電樞呈園筒形,由鑄鋼構成,它和拖動電動機同軸,由拖動電動機帶動旋轉。磁極4 做成爪形,由勵磁繞組3 勵磁。其軸就是電磁轉差離合器的輸出軸,也叫從動軸。
3. 磁路與反饋
勵磁繞組3 由調節器SR 通過集電環5 和電刷6 提供可調的直流勵磁電流Ir,使磁極4 產生磁通Φ。從動軸上裝有測速裝置7,用以進行轉速反饋。


4.2.1.2 滑差電動機的工作原理
1. 電樞產生感應電流
為了便于說明,我們把電樞看成是由無數根籠條構成的。當拖動電動機帶動電樞按順時針方向旋轉時,電樞上的籠條將切割磁極的磁力線,產生感應電動勢和電流,其方向由右手定則判定,如圖4-8 所示。
2. 電磁轉矩
籠條里的感應電流又和磁通相互作用,產生電磁力,方向由左手定則判定。這些電磁力將形成力圖使電樞按逆時針方向旋轉的電磁轉矩。但電樞不可能逆時針方向旋轉,于是,在反作用力的作用下,使磁極和從動軸一起按順時針方向旋轉。調節SR 的電位器RP,就可以調節直流電流Ir 和磁通Φ 的大小,從而也調節了電磁轉矩的大小和轉速。
4.2.2 滑差電動機的機械特性
4.2.2.1 自然機械特性
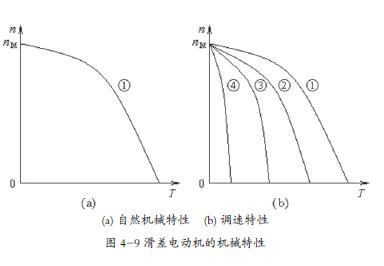
滑差電動機的理想空載轉速就是拖動電動機的轉速nM。其自然機械特性的形狀和力矩電動機十分相似:當負載轉矩增大時,轉速下降很快,如圖4-9(a) 中之曲線①所示。原因有二:
1. 轉子電阻較大
如上述,其轉子材料為鑄鋼,電阻較大,所以其臨界轉矩下移。
2. 磁場不能自動補充
在普通異步電動機中,當轉速由于負載增大而下降時,轉子電流增加,轉子電流的去磁效應增強,空氣隙中的合成磁通減小,定子繞組的感應電動勢減小,定子電流將自動增大,使空氣隙中的合成磁通和電磁轉矩有所增加。但在滑差電動機里,勵磁繞組里的電流不會自動增大。而只能靠加大轉差來增強電磁轉矩,于是轉速迅速下降。
4.2.2.2 調速特性
滑差電動機是通過調節圖4-7 中的電位器RP,從而調節勵磁電流來進行調速的。
這種方法和調節電壓的調速在本質上是相同的。因為在異步電動機里,調節電壓,實質上也就調節了磁通。在圖4-9(b) 中的曲線① ~ ④,就是勵磁電流分別為100%、70%、40% 和10% 時的機械特性。
4.2.2.3 閉環機械特性
1. 轉速負反饋的作用
假設條件和方才相同:拖動系統正在Q1 點運行,負載轉矩為TL1,與之相平衡的電磁轉矩為TM1,轉速為n1,機械特性如圖4-10(a) 中之曲線①所示。今負載轉矩增加為TL2,大于電磁轉矩TM1,拖動系統必沿著曲線①減速。與此同時,轉速反饋信號也減小,使控制裝置SR 的輸出電流增大,機械特性變成了曲線②,工作點跳轉到Q3 點,電磁轉矩增大為TM3,超過了TL2,于是轉速沿著曲線②上升,當上升到n1 時,電磁轉矩減小為TM2,和負載轉矩TL2 相平衡。宏觀地看,就好像負載轉矩增加后,轉速不變似地。
2. 閉環機械特性
歸納上述過程,可以看出,在閉環控制的情況下,當負載增加,轉速下降時。測速裝置立即將下降了的轉速信號,反饋給調節器SR,當SR 接收到轉速反饋信號后,立即自動地增大勵磁電流Ir,使轉速基本保持不變,得到了很硬的機械特性。圖4-10(b) 中的曲線⑤ ~ ⑧就是在不同轉速下,經過轉速反饋后的機械特性。

小小體會
在分析滑差電動機的機械特性時,必須注意分析轉差離合器部分的特點。
一方面,它的旋轉原理和異步電動機完全相同,所以,其機械特性的基本特點是和異步電動機是相同的;
另一方面,其磁場的變化規律和異步電動機的定子磁場又有著本質的區別。
4.3 電磁離合器的PWM 調速
開發背景
偏遠山區小水電站常常只有幾臺不并網的孤立水輪發
電機組。由于容量小,由負載變化引起的電壓和頻率的變
化幅度很大,而且十分頻繁,發電機的輸出電壓很不穩定。
操作工需不斷地改變水輪機導葉的開度。由于導葉相當沉
重,工人們的手上常常血泡連連,不少水電站為此安裝了
電動裝置,因為電動機正、反轉控制時,換向時沖擊電流
很大,接觸器容易損壞,故普遍采用電動機長時間通電,
由正、反電磁離合器控制其旋轉方向。
4.3.1 電磁離合器的正反向控制
4.3.1.1 采樣參數的選擇
1. 負載變動的結果
負載變動時,發電機的第一個反應,就是其輸出電壓將發生變化。與此同時,機組中的轉矩平衡被破壞,機組的轉速也將發生變化,導致發電機電壓值和頻率都發生變化。
例如,當負載電流增加時,發電機的輸出電壓將下降;與此同時,發電機軸上的阻轉矩增加,機組的轉速下降,發電機的輸出電壓進一步下降,頻率也隨轉速而下降。
2. 采樣參數的選擇
因為發電機輸出電壓的大小,除了和汽輪機的轉速有關外,還和負載電流有關。而頻率的大小只和發電機的轉速成正比:機組的轉速下降,頻率也下降;反之,機組的轉速上升,頻率也上升。所以,頻率便成了調整發電機組運行狀況的主要依據。
4.3.1.2 控制框圖
1. 主體框架
如圖4-11 所示,最終的控制對象是三相同步發電機G;發電機由水輪機帶動,水輪機的轉速由導葉的開度決定,導葉由電動機M 拖動。

發電機輸出的不穩定表現在兩個方面:電壓和頻率。由于電壓的大小和負載有關,不能作為調節導葉開度的依據。所以,改變導葉開度的依據是頻率。頻率高了,應減小導葉的開度;反之,頻率低了,應增大導葉的開度。
2. 導葉的拖動系統
(1) 拖動系統的構成
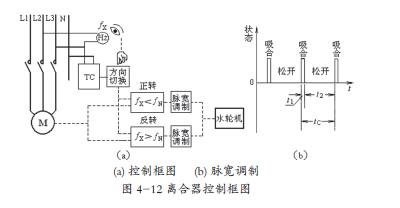
如上述,電動機并不直接拖動水輪機的導葉,而是通過正、反兩個離合器來控制導葉的開大或關小,如圖4-12(a) 所示。具體地說,當發電機發出的電壓頻率fX 小于額定頻率fN(fX < fN) 時,讓正轉離合器得電,導葉正轉,開度加大,水輪機加速,頻率上升;反之,當頻率fX 大于額定頻率fN(fX > fN) 時,讓反轉離合器得電,導葉反轉,開度減小,水輪機減速,頻率下降。
(2) 轉速的調節
因為電動機并不調速,離合器本身也不可能調速。所以采用“脈沖調速法”,是把離合器的開關“一開一關”地交替著,要是開的時間長,關的時間短,輸出軸的平均轉速就高,反之,開的時間短,關的時間長,平均轉速就低。因為控制信號通常是脈沖信號,故又稱為脈寬調制。
如圖4-12(b) 所示,離合器每次吸合的時間為t1,松開的時間為t2,每次一開一合所需時間為一個周期tC。很明顯:tC=t1+t2每次吸合的時間和周期之比,稱為占空比:D=t1/tC (4-1)式中,D 為占空比;t1 為離合器的吸合時間,s;tC 為離合器的動作周期,s。改變離合器吸合與松開的占空比,就可以改變調節導葉開度的快慢了。
4.3.2 脈寬調制信號
4.3.2.1 利用多諧振蕩器
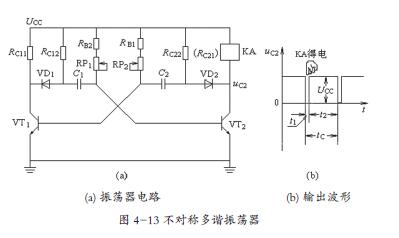
圖4-13(a) 所示,是一個多諧振蕩器的電路,但它兩邊的參數是不對稱的。其振蕩時間大致如下:
t1=0.7(RB1+RP2)C2
t2=0.7(RB2+RP1)C1
tC=t1+t2 (4-2)
式中,t1 為VT1 截止、VT2 飽和導通的時間,s;t2 為VT1 飽和導通、VT2 截止的時間,s;tC 為脈沖周期,s。t1 和t2 的時間長短可根據具體情況通過電位器RP1 和RP2 來進行調整。繼電器KA 在VT2 飽和導通時得電,接通電磁離合器。
4.3.3.2 緩沖繼電器
4.3.2.2 利用時基電路
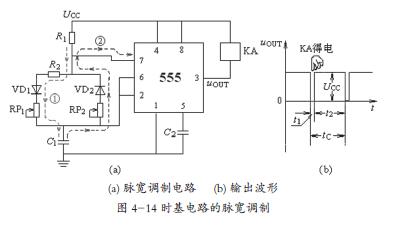
利用時基電路來實現脈寬調制,可使電路變得十分簡潔,如圖4-14(a) 所示。
剛接通電源時,由于電容器C1 尚未充電,時基電路的2 腳和6 腳為低電位,輸出端(3 腳) 為高電位,KA 處于失電狀態。這時,電源將通過R1、R2、VD1、RP1 向電容器C1 充電,如圖中之虛線1 所示。當C1 上的電壓達到并超過電源電壓的2/3 時,時基電路的輸出端翻轉為低電位,KA 得電,電磁離合器吸合。
這時,7 腳對地導通,C1 通過RP2、VD2 和7 腳放電。當C1 上的電壓低于電源電壓的1/3 時,時基電路的輸出端又翻轉為高電位,KA 失電,電磁離合器脫開。調節RP1,可以調整圖4-14(b) 中之t2;而調節RP2,則可調整t1。
4.3.3 控制電路
4.3.3.1 正反向繼電器
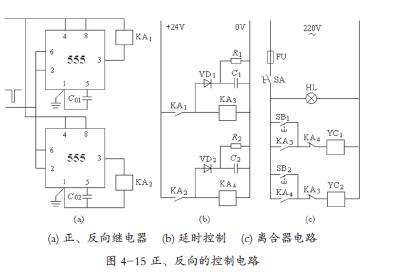
圖4-15 只畫出了一個方向的繼電器,而水輪機的導葉既需要正轉以加大開度;也需要反轉以減小開度。所以,需要有正、反兩個方向的繼電器。實際工作中,可以用雙時基模塊“556”來實現,這里為清楚起見,使用兩個“555”模塊,如圖4-15(a) 所示。KA1 是正向繼電器,KA2 是反向繼電器。為了防止在臨界點引起反復開關的振蕩,在正轉和反轉之間,應有必要的間隙。所以,在緩沖繼電器KA3和KA4 的電路中,加入了延時環節。
如圖4-15(b) 所示,以正轉控制為例,當KA1 觸點閉合時,由于電容器C1 的充電,KA3 并不能立即動作,而稍有延時。但在離合器脫開時,是不需要延時的,二極管VD2就是用來阻止C1 向KA3 放電的。C1 將通過R1 放電。因為有此延時環節,所以,緩沖繼電器由直流電源供電。
如圖4-15(b) 所示,以正轉控制為例,當KA1 觸點閉合時,由于電容器C1 的充電,KA3 并不能立即動作,而稍有延時。但在離合器脫開時,是不需要延時的,二極管VD2就是用來阻止C1 向KA3 放電的。C1 將通過R1 放電。因為有此延時環節,所以,緩沖繼電器由直流電源供電。
4.3.3.2 緩沖繼電器
KA3 和KA4 是緩沖繼電器,用于控制電磁離合器YC1 和YC2,進而控制水輪機導葉的開與關,如圖4-15(c) 所示。YC1 和YC2 的電源采用發電機自己發出的交流電。
小小體會
在原蘇聯的《電力拖動》教材里,上述調速方法被稱為“脈沖調速”,但只有理論價值,并不實用。而在電磁離合器的控制電路中,竟用上了。這是在實踐中逐漸摸索出來的結果。















共0條 [查看全部] 網友評論