3.6.3多軸機器人應(yīng)用中DIPIPM™的健康管理

多軸機器人在工業(yè)控制領(lǐng)域是一個比較時髦的應(yīng)用,也是工業(yè)4.0,中國制造2025里的重要內(nèi)容。圖11就是一個典型的多軸機器人。其一共有6個受伺服電機控制的轉(zhuǎn)動軸,所以也被稱為6軸機器人。

圖11 6軸機器臂示意圖
前一節(jié)我們是針對一個已經(jīng)設(shè)計好的門機變頻器進行校驗。看它是否能滿足多年的運行的條件。這次我們換個方向。如何從設(shè)計之初就考慮壽命問題。如何確定設(shè)計一款伺服驅(qū)動器能滿足多年運行的要求。
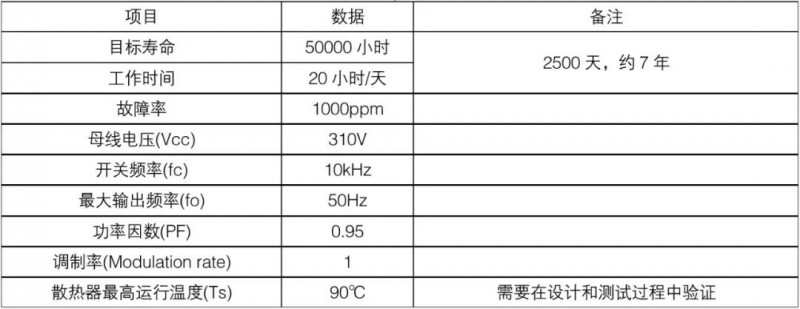
首先,重中之重的第一步是確定一下基本條件,就像表2這樣。
表2 伺服驅(qū)動器相關(guān)應(yīng)用條件
然后是運行周期。同樣是運行50000小時,是以10s一個循環(huán)走還是以20s一個循環(huán)走,對循環(huán)次數(shù)的影響非常明顯。多軸機器人的最常見運動以急加速、急減速為特征的往復運動。圖12為伺服驅(qū)動器的運行模式示意圖。
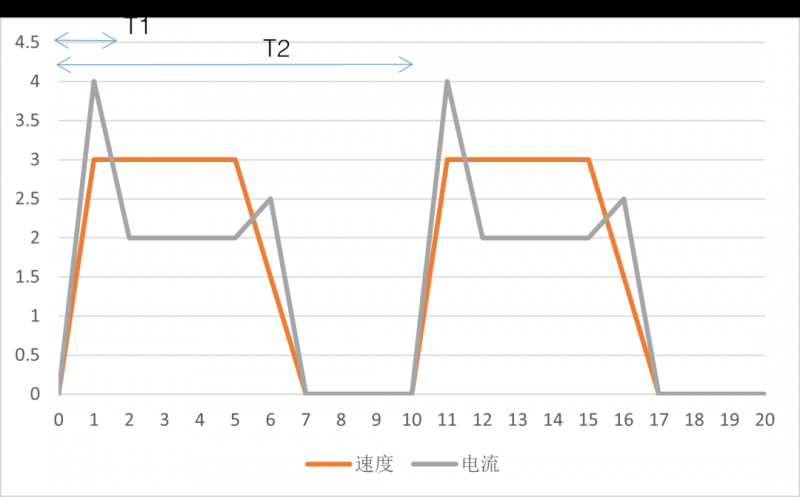
圖12 伺服驅(qū)動器的運行模式示意圖
其中:
黃色:速度曲線
灰色:輸出電流曲線。
T1:加速時間。一般此時伺服驅(qū)動器會以允許的最大電流工作。我們假設(shè)T1=3s。
T2:整個運行循環(huán)的時間。我們假設(shè)T2=20s
那么在50000小時的壽命中,我們的伺服驅(qū)動器需要運行50000小時/20s=9M次
根據(jù)圖5的功率循環(huán)曲線和表2的1000ppm的損壞率要求。那么單次運行中ΔTj-c需要低于25℃。
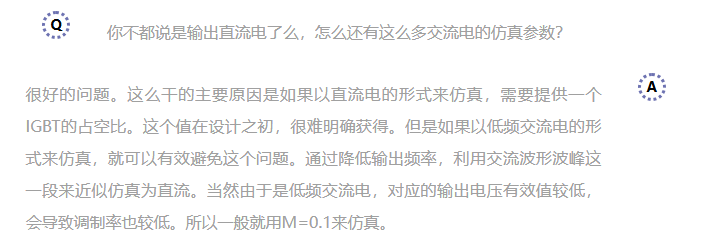
可能有些讀者要說了,你都整了這么多了,模塊用哪個啊?是時候介紹我們的主角了。接下來有請我們新一代明星,PSS50S73F6。它是三菱電機第7代小型DIPIPM™。在兼容以前同封裝器件的基礎(chǔ)上,又把最大結(jié)溫提升到了175℃。讓我們看看,在表2的條件下PSS50S73F6可以跑到多少電流。
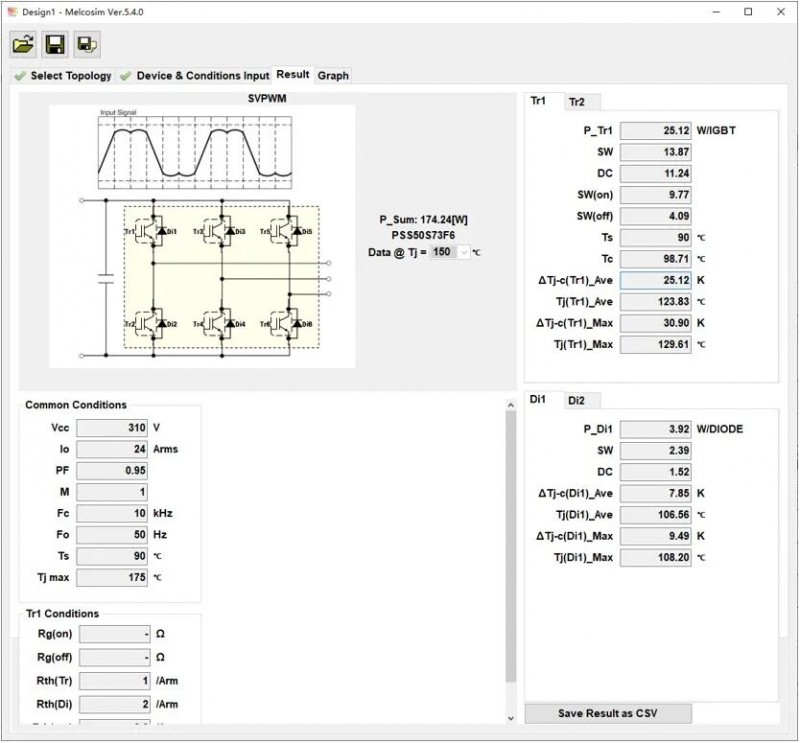
圖13 PSS50S73F6仿真界面
答案來了。Io=24Arms。也就是說PSS50S73F6在上述這些工況下,每10s跑一個24A有效值的電流,可以跑50000小時。
另外需要說明的是這個電流是在無限散熱支持下,需要重復運行的電流。怎么理解?
-
伺服驅(qū)動器并不具備無限散熱能力。設(shè)計條件中的Ts=90℃是需要實踐驗證的,你設(shè)計的散熱器、風道、風扇是否足以將相應(yīng)的熱量帶走。
-
既然是需要重復運行,那就涉及到周期,多久跑一次。如果周期更短,周期數(shù)更多,相應(yīng)需要更低的ΔTj-c和更低的運行電流。
-
對于伺服驅(qū)動器來說除了需要重復運行的電流,還有不需要重復運行的電流,比如堵轉(zhuǎn)。此類工況的仿真主要涉及到Tjmax的仿真。待會我們來詳細說說。
我們現(xiàn)在中場休息。廣告之后馬上回來。
好了,我們下半場開始。下半場我們詳細講講堵轉(zhuǎn)工況的仿真。
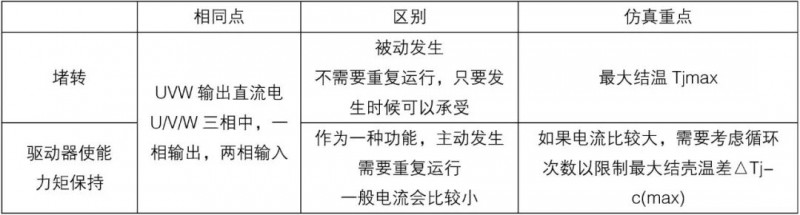
首先什么是堵轉(zhuǎn)?字面意義上理解,電機由于外部機械原因?qū)е虏荒苻D(zhuǎn)動。沒錯,這是被動的堵轉(zhuǎn)。相應(yīng)的還會有主動的“堵轉(zhuǎn)”。當然一般也不會叫這個名字。一般會被叫做‘驅(qū)動器使能’或者‘力矩保持’等等。兩者的異同主要如表3所示。
表3 主動堵轉(zhuǎn)和被動堵轉(zhuǎn)的異同
這一節(jié)呢,我們主要講一講由于機械原因?qū)е碌谋粍佣罗D(zhuǎn)。當這種堵轉(zhuǎn)發(fā)生時,我們需要以怎么樣的方式去設(shè)置保護點。我們還是羅列一下工作條件,如表4。
表4 堵轉(zhuǎn)工況仿真條件

好了,我們來看一下仿真結(jié)果,圖14。由于PSS50S73F6最大結(jié)溫為175℃,它的最大運行結(jié)溫可以到150℃。當Io=23.5Arms或者說Io=33.2Apeak時,ΔTj-c(max)=52.36℃,Tj(max)=150.87℃。這基本上就是我們的堵轉(zhuǎn)保護的極限值。
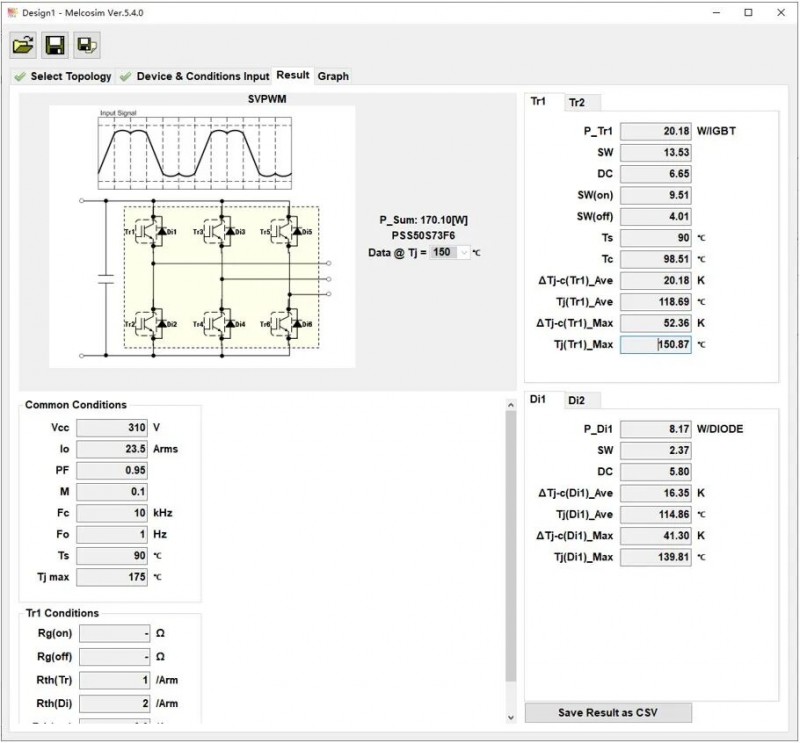
圖14 PSS50S73F6堵轉(zhuǎn)仿真
既然如此,我就再說說這其中的其他幾個坑。
-
首先,交流還是直流?驅(qū)動器中常見的電流計算方式是電流峰值/1.414=交流有效值。當在交流情況下,這樣的計算沒有問題。但是如果出現(xiàn)堵轉(zhuǎn),情況就不一樣了。我們來看表5。發(fā)現(xiàn)問題了么?你以為是10Arms的交流電,實際上可能是14Arms/peak的直流電。
表5 交流電還是直流電

-
接下來是仿真頻率的問題。首先當Fo<10Hz以下時,ΔTj-c(max)和Tj(max)逐漸變大到不可忽視的程度。其次選用多少頻率進行上述仿真,各個公司習慣不太一樣。我的習慣是伺服驅(qū)動器用1Hz來仿真,通用變頻器用5Hz來仿真。
-
剛才仿真出來的ΔTj-c(max)=52.36℃,對應(yīng)循環(huán)次數(shù)大約是10萬次。對于單次堵轉(zhuǎn)來說無所謂。但是如果該工況是需要重復出現(xiàn)的,可以考慮限制ΔTj-c(max)≤40℃。對應(yīng)的壽命大約為100萬次。
-
最后是散熱器溫度事情。如前所述,Ts=90℃是一個理想散熱下能夠維持的溫度。但是沒有一個散熱系統(tǒng)是理想的。如果堵轉(zhuǎn)只發(fā)生1-2s,我們可以忽略散熱器溫度的變化。畢竟150℃到175℃還有25℃的余量。但是如果這個堵轉(zhuǎn)要持續(xù)10s,散熱器溫度的變化不可忽視。在這10s里,散熱器溫度會逐漸升高,并推動Tj逐漸升高,直到最終損壞。
好了,就這樣吧,下課。















共0條 [查看全部] 網(wǎng)友評論