���������ں��������L(f��ng)�˵��������îa(ch��n)���M�u���v�u��Σ����(w��n)���c���m���p�u�����鳣Ҋ�b�ã�ͨ�^����(d��ng)������Ƭ�a(ch��n)���������������ƙM�u��
�������y(t��ng)�p�u������ϵ�y(t��ng)��هģ�M�·��?q��)��ÿ�����������ϵ�y(t��ng)��(f��)�s���S�o(h��)���y���U(ku��)չ�Բ�ȹ���ȱ�c(di��n)���S�����g(sh��)�l(f��)չ���ɾ���߉��������PLC���{����߿ɿ��ԡ������`���Լ����ڔU(ku��)չ�ă�(y��u)��(sh��)���ѳɞ�ԓ�I(l��ng)��V����(y��ng)�õ����ͽ�Q������
����01����PLC�Ĝp�u������ϵ�y(t��ng)�M��
����������
�������ڲɼ������M�u�ǡ��M�u���ٶȡ����ٵ���̖(h��o)���������݃x�����ٶ�Ӌ(j��)���ٶȂ������ȡ�
����PLC������
����ϵ�y(t��ng)�ĺ��Ŀ��Ɔ�Ԫ��ؓ(f��)؟(z��)���Ղ�������̖(h��o)������(j��)�A(y��)�O(sh��)�Ŀ����㷨Ӌ(j��)����p�u���Ą�(d��ng)��ָ�
������(zh��)�ЙC(j��)��(g��u)
��������(j��)PLCݔ���Ŀ�����̖(h��o)�(q��)��(d��ng)�p�u���\(y��n)��(d��ng)������Һ��ϵ�y(t��ng)��늙C(j��)�ȡ�
�����˙C(j��)���棨HMI��
���������@ʾϵ�y(t��ng)��B(t��i)���O(sh��)�Å���(sh��)���M(j��n)�й����\��ȡ�

����02����PLC�Ĝp�u������ϵ�y(t��ng)��������
������(sh��)��(j��)�ɼ�
������������(sh��)�r(sh��)�ɼ����w�M�u�ǡ��M�u���ٶȵ��\(y��n)��(d��ng)����(sh��)������ݔ��PLC��������
������(sh��)��(j��)̎��
����PLC��(du��)��������(sh��)��(j��)�M(j��n)��̎����Ӌ(j��)�㮔(d��ng)ǰ�M�u��B(t��i)�����c�O(sh��)��Ŀ��(bi��o)���^�������`����̖(h��o)��
��������Ӌ(j��)��
����PLC����(j��)�A(y��)�O(sh��)�����㷨����PID����Ӌ(j��)����p�u������Ą�(d��ng)��ָ���ƫ�D(zhu��n)�ǶȺ��ٶȣ���
������(zh��)���
������(zh��)�ЙC(j��)��(g��u)����PLCָ��(q��)��(d��ng)�p�u��Ƭ�M(j��n)������(y��ng)ƫ�D(zhu��n)���a(ch��n)�������M�u�ķ���(w��n)�����ء�

��������ϵ�y(t��ng)������B���Ї�����ij����
����A��������
����ԓϵ�y(t��ng)���ð���NJ400ϵ��PLC��
����Bϵ�y(t��ng)�ܘ�(g��u)
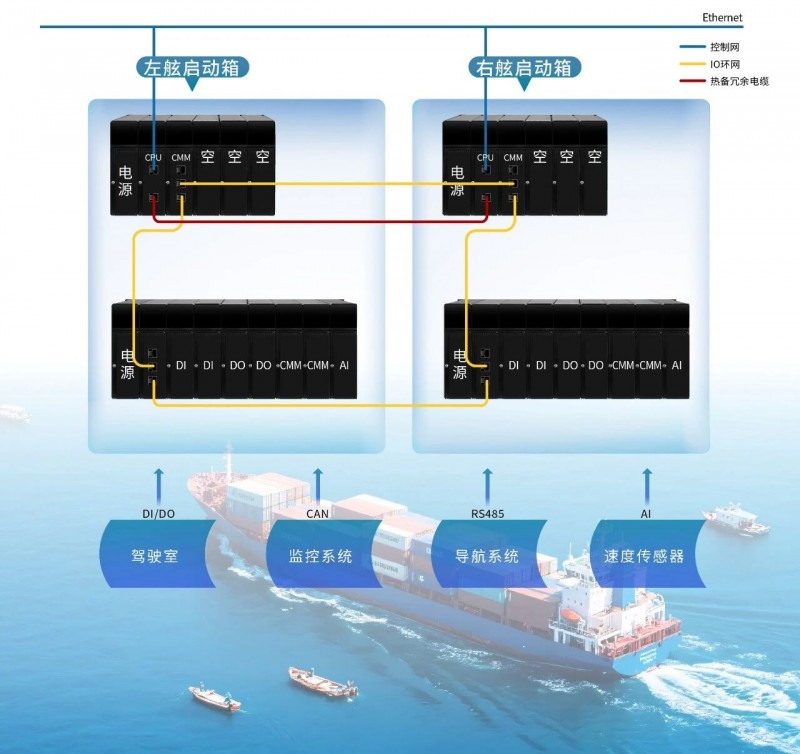
���������p�C(j��)������ܘ�(g��u)������ɂ�(g��)PLC�C(j��)�ܷքe�����ڃɂ�(g��)���ƹ��С�
�����ɂ�(g��)��̫�W(w��ng)�h(yu��n)��I/O�C(j��)�ܷքe���������Ϝp�u�������c����CPU�C(j��)�ܹ�ͬ�M����̫�W(w��ng)�h(hu��n)�W(w��ng)��
����C��������ԭ��
����ϵ�y(t��ng)ͨ�^ģ�M��ݔ��ģ�K�ɼ��M�u�ǂ����������݃x/�A�ǃx������̖(h��o)���M�u�Ƕȡ����ٶȣ�����(j��ng)PLC��(n��i)�������㷨�\(y��n)���ݔ��ָ���(q��)��(d��ng)Һ���ׄ�(d��ng)�����Ƅ�(d��ng)�p�u���D(zhu��n)��(d��ng)�Ԯa(ch��n)����(w��n)�����أ��������Р�B(t��i)��Ϣ�ψ�(b��o)������O(ji��n)��ϵ�y(t��ng)��
����D������Ҫ���c(di��n)
����CPU���ܣ�CPU401-0511���Ç��a(ch��n)̎������
����CPU���ࣺ�p�C(j��)�����ࡣ
�����W(w��ng)�j(lu��)���ࣺ�����p�W(w��ng)�ڣ�10/100M���m��(y��ng)��
�����������ࣺ��̫�W(w��ng)��վ�͏�վ�γɭh(hu��n)�W(w��ng)��֧��By-pass���ܡ�
����ԓϵ�y(t��ng)�ijɹ���(y��ng)���@�����������ڐ��Ӻ��r�µķ�(w��n)�����c���m�ȣ��p�u�����_(d��)�I(l��ng)��ˮƽ���S���˹������c���m��(y��ng)�㷨������ںϣ�����PLC�����m(x��)�M(j��n)��——���ǻ۵��A(y��)�y(c��)���ơ����͵��ܺı��F(xi��n)�����V���Ĵ����m�������������ܴ����ͺ����b�����ϵ�y(t��ng)�ṩ��(ji��n)��(sh��)���g(sh��)������















��0�l [�鿴ȫ��] �W(w��ng)���u(p��ng)Փ