公司內部的物料流自動化程度越來越高,自動運輸車輛在倉庫和生產中也越來越流行。自動運輸車進一步發展的核心主題是 3D 環境檢測和車輛之間的合作。除了技術發展外,還必須考慮經濟效率。
自動運輸車不再僅用于倉庫,大家還可以在生產供應中找到它們的身影。生產供應對 AGV 的要求與在倉庫中的要求非常相似,這兩個領域相互助力。產品通過倉庫供應,但是倉庫會因生產而被填滿。自動化運輸已進入這兩個領域,自動化必須一次又一次地適應動態環境。對于 AGV 來說也是如此。
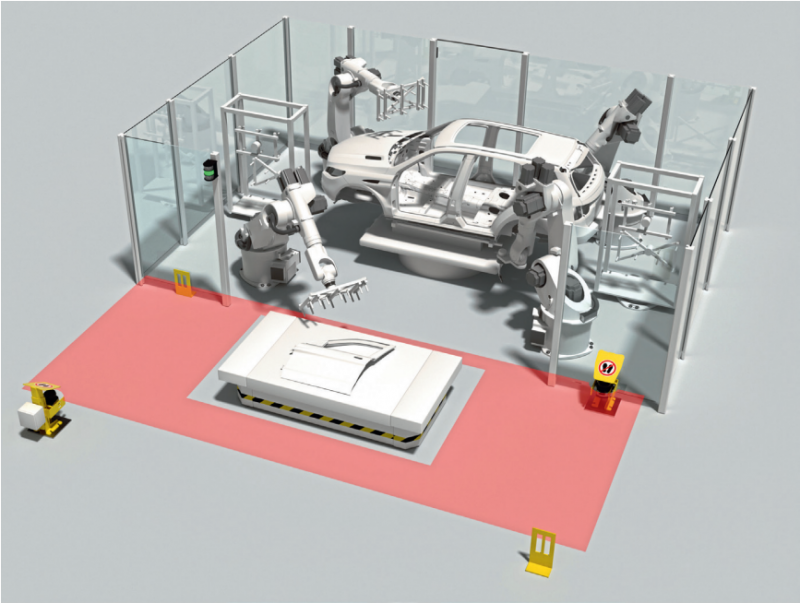
無論是工業機器人還是自動駕駛汽車,只要沒有人直接負責或控制方向盤,就必須優先考慮安全性。用于生產車輛的經典安全系統是 2D 激光掃描儀,它的傳感器會在其前面生成一個保護區,當掃描儀在其保護區內定位到物體,就會觸發警報或直接停止車輛前行。通過其中幾個傳感器,可以在車輛周圍創建一個 360°的保護區。然而,工廠中的許多障礙物都延伸到了地面上,需要把它們視為一個整體才能避開。如果障礙物是移動的,需要等其離開車輛的駕駛區域。
導航和安全需要 3D 視角
2D 激光掃描儀在給定區域創建一個平坦的“安全區”
弗勞恩霍夫物流研究所(IML)的Thomas Albrecht 指出了一個可能存在的問題 :“想象一根桿伸入車輛的駕駛空間,通過光傳感器的掃描范圍后停止進一步深入。如果車輛接觸到桿,最初可能只會造成財產損失。但是如果桿移動并撞到另一端的人,很快就會造成人身傷害。”如果考慮到大多數產品都是可用于任何類型車輛的,那么可靠的安全系統是絕對必要的。3D 導航是下一步,這不僅僅是關于四周環境的 3D 地圖。相反,機器人應該識別其環境中的內容,并能夠盡可能多地鑒別它們。
自動運輸車輛目前基于其行駛的工作環境的數字地圖,或者通過掃描分布在公司場所的反射器來導航,兩種方法各有優缺點。數字地圖更具有靈活性,它們可以快速調整程序。通過反射器導航則更精確,因為它使用了固定且可明確分配的錨點。此外,企業不必為這種類型的尋路安裝任何反射器。
但是,這兩種方法都不能實時工作和用于真正自主導航。如果 AGV 能夠獨立識別它們所在的位置并開創性地尋找路線,那么自主移動機器人 AMR 這個術語確實是名副其實的。人工智能對此有所幫助,以這種方式學習和適應的機器人也可以獨立應對動態環境。
用人工智能實現真正的自主行動
通過像 Gideon Bros. 這樣 AI 支持的圖像處理
運輸機器人可以越來越好地識別所處的環境
人工智能變得越可靠和越強大,導航和安全系統就會變得越好。也許有一天,運輸機器人會能夠完全獨立、平穩地在工廠中蜿蜒穿行。
談到智能,人們還應該研究群體智能。AMR 不僅可以自己定位,還可以一起尋找路徑。目前,AGV 通常由中央控制單元監控,通知單個車輛在哪里需要它以及任務是什么。
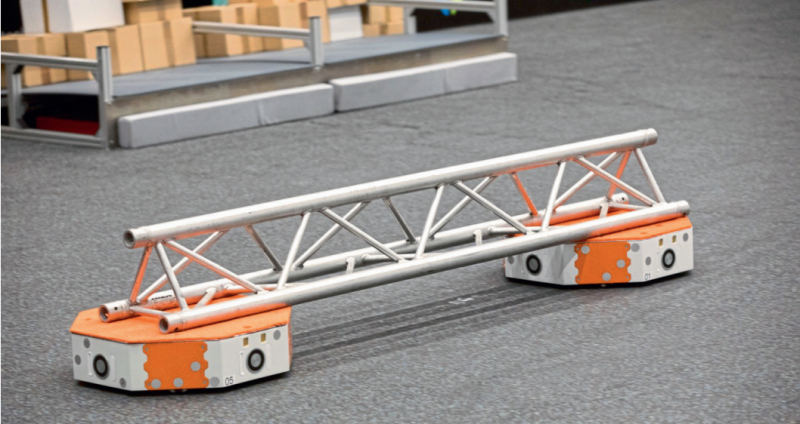
將來,AGV 或許也可以在它們之間相互解決問題。AMR 可以不斷地相互交流和協調。隨后,訂單將發送到所有運輸單元。當前空閑的單元將被接管。這些車輛還可以合作并共同處理運輸訂單。例如,在運輸大件貨物的情況下,多個機器人可以協調并一起拾取貨物。
追求性價比
為了讓 AGV 市場持續增長,這些車輛必須是大家能夠負擔得起的。每個人都應該可以使用 3D 相機、人工智能和分散控制,包括大型企業、中型公司和初創企業。因此,模塊化也是進一步開發 AGV 時的重要標準。
“未來 AGV能夠完成更多的任務,這意味著單個車輛必須能夠做得更多。”漢諾威綜合生產研究所(IPH)的 Marvin Abt 說。在機器人開始工作之前,必須進行的設置環節可以由用戶來執行。設備維護與此情況類似。如果設備出現故障,生產可能會中斷。即使外部技術人員當天趕來,也會浪費寶貴的時間。如果員工可以自己進行調試、服務和基本維修,便可以節省時間和金錢。
“開箱即用”的 AMR 將是中小企業將其生產供應升級到最先進水平的一種選擇。















共0條 [查看全部] 網友評論