



無刷電機驅動器是杰美康科技采用國際最新電機專用數字處理器DSP 為核心配以高速度數字邏輯芯片高品質功率模塊,組成具有集成度高、體積小、保護完善、接線簡潔明了、可靠性高等一系列優點。該驅動器可提供:操作面板速度設定,外部模擬電壓調速、外電位器調速,脈寬調速等功能。具有操作安全、調速方式靈活多樣、轉速即時顯示、保護功能齊全等特點 。

主要特點:
1.調速范圍寬
2.低噪音,高效率,運行平穩
JBL系列無刷電機采用了4極和8極轉子設計,機型號有42、57、60、70、80、86、110;0.1NM到6NM的連續轉矩;高性能釹硼磁鋼提供3倍 以上的峰值扭距。
驅動器接口信號描述(JDB-01系列)
| 電源輸入端 | 典型接線圖(JBD-01系列) | ||||
| 引腳序號 | 引腳名 | 中文定義 | 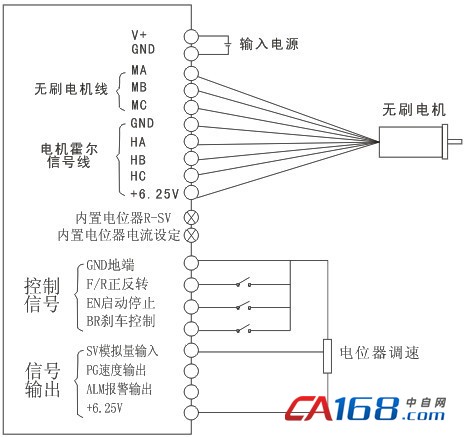 |
||
| 1 | V+ | 直流電源正輸入 | |||
| 2 | GND | 直流電源負輸入 | |||
| 電機輸入端 | |||||
| 引腳序號 | 引腳名 | 中文定義 | |||
| 1 | MA | 電機A相 | |||
| 2 | MB | 電機B相 | |||
| 3 | MC | 電機C相 | |||
| 4 | GND | 地線 | |||
| 5 | HA | 霍爾信號A相輸入端 | |||
| 6 | HB | 霍爾信號B相輸入端 | |||
| 7 | HC | 霍爾信號C相輸入端 | |||
| 8 | +6.25 | 霍爾信號的電源線 | |||
| 電源和電機接線端 | 霍爾傳感器信號端 | |||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||
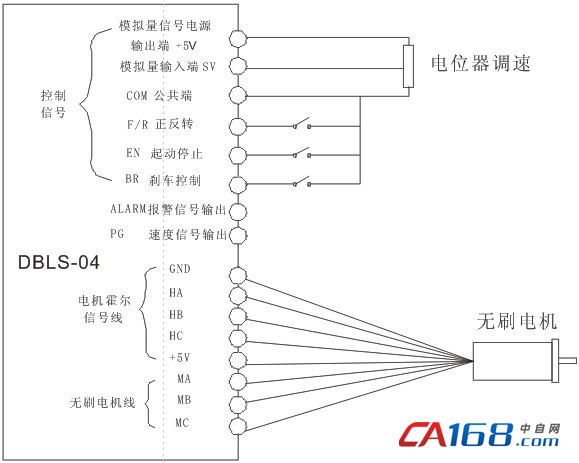
| 驅動器控制端子 | 典型接線圖(JDB-04-09系列) | |||||||||||||||||||||||||||||||||||||||
|
 |
調速方式
本驅動器提供以下兩種調速方式用戶可任選一種:
高壓JB-04-09系列可在面板工作模式下調速,通過+,-按鍵來調節無刷電機不同的速度。
外部輸入調速
將外接電位器的兩個固定端分別接于驅動器的GND和+6.25v一端,將調節端接于SV端即可使用外接電位器(10K~50K)調速,也可以通過其它的控制單元(如PLC、單片機等)輸入模擬電壓到SV端實現調速(相對于GND),SV端口的接受范圍為DC OV~+5V,對應電機轉速為0~額定轉速。
該驅動器也可以使用外部數字信號調整
在SV 與GND 之間可以施加幅值為5V,頻率為 1KHz~2KHz 的脈寬數字信號(PWM)進行調速,電機轉速受其占空比線性調節。這時可以通過調整 R-SV 電位器對SV 數字信號幅值進行0~1.0 比率 衰減處理,一般將 R-SV 調到1.0,對SV 輸入數字信號不做衰減處理。
電機運行/停止控制(EN)
通過控制端子EN相對于GND的通、斷可以控制電機的運行和停止。當端子斷開時電機運行反之電機停止。使用運行/停止端控制電機停止時,電機為自然停車,其運動規律與負載慣性有關。
電機正/反轉控制(F/R)
通過控制端子F/R與端子GND的通、斷可以控制電機的運轉方向。當F/R與端子GND不接通時,電機順時針運行(面對電機軸),反之則電機逆時針方向運轉;為避免驅動器的損壞在改變電機轉向時,應先使電機停止運動后,再操作改變轉向,避免在電機運行中進行運轉方向操作。
制動停機(BREAK)
通過控制端子BK扮與端子GND的通、斷可以控制電機的制動停機。當控制端子BK與端子GND斷開時,電機運行,接通時電機快速制動停止,制動停機比自然停機快,具體停機時間與用戶系統的負載慣量有關。因制動停機對電氣和機械均有沖擊,如無特殊停機要求應采用自然停機。
電機轉速信號輸出(PG)
速度脈沖輸出,該端口為OC 輸出(30V/10mA max),要得到信號應與電源之間接 3KΩ~10KΩ上拉電阻。該端將輸出頻率與電機轉速成正比的固定脈 寬 (50uS)負脈沖串,電機每轉的輸出脈沖個數為3 x N, N 為電機的極數。例:2對極即四極電機每轉12個脈沖.當電機轉速為500轉/分時端子PG的輸出脈沖為6000個。
報警輸出
驅動器報警輸出,該端口為OC 輸出(30V/10mA max)。要得到信號應與電源之間接 3KΩ~10KΩ上拉電阻。報警時該端與GND 導通(低電平),同時驅動器自行停止工作處于報警狀態。
驅動器故障
驅動器內部出現過壓或過流時驅動器進入保護狀態,驅動器會自動停止工作,電機停止,驅動器上的藍燈為閃礫,只要將使能端重新復位(即EN與GND斷開)或是斷電,驅動器才能解除報警。發生此故障請檢查電機接線。