詳細資料:
JMC-2410是一款PCI接口4軸運動控制卡;使用了專用的運動控制ASIC芯片,支持板卡ID設置、動態修改目標位置、支持非對稱加減速等功能。
可接受編碼器信號,并提供位置鎖存函數,并可產生中斷;支持位置比較(大于、等于、小于)功能,比較條件滿足時可產生比較輸出信號,并且可產生中斷。
| 規格 |
應用范圍 |
|
1,32位32MHz3.3/5.0 OV PCI標準協議
2,單卡可控制4軸
3,最大脈沖輸出頻率5M PPS,支持T型曲線
4,S型速度曲線加速/減速
5,支持運行中改變速度(飛行加/減速)
6,28bit位置計數器,計數范圍:-134.217.728 to
+134.217.727
7,內置位置比較器,條件滿足可產生中斷,并支持比較輸出
8,支持中斷功能
9,支持位置鎖封,可產生中斷
10,支持任意兩軸間直線插補
11,支持編碼器輸入
12,對限位開關,原點開關,索引信號,INP,ERC,ALM有專
門的I/O接口
13,支持手搖輪輸入
14,支持板號設置,同一系統可支持16張板卡
15,20路開集電極非隔離數字輸出(DO)
16,20路隔離數字輸入(DI)
|
1,半導體相關生產設備
2,SMT相關生產設備
3,LCD相關生產設備
4,激光加工設備
5,機器設覺及自動化檢測設備
6,生物醫學自動檢測,處理設備
7,工業機器人
8,專用數控設備
|
信號連接
脈沖信號和方向信號輸出
各軸的OUT 和 DIR 輸出口是用于輸出脈沖和方向信號,其輸出格式可以由程序設定成CW/CCW 雙脈沖模式或脈沖+方向模式,用戶可通過設定 J1-J8 跳線來設定脈沖為差分輸出或 集電極開路輸出兩種方式
| 下表為接口CN7的脈沖輸出信號表: |
OUT/DIR接口的工作原理 |
| CN7引腳號 |
信號 |
說明 |
CN7引腳號 |
信號 |
說明 |
| 1 |
OUT1+ |
第1軸脈沖信號 |
35 |
OUT3+ |
第3軸脈沖信號 |
| 2 |
OUT1- |
36 |
OUT3- |
| 3 |
DIR1+ |
第1軸脈沖信號 |
37 |
DIR3+ |
第3軸脈沖信號 |
| 4 |
DIR1- |
38 |
DIR3- |
| 5 |
OUT2+ |
第2軸脈沖信號 |
39 |
OUT4+ |
第4軸脈沖信號 |
| 6 |
OUT2- |
40 |
OUT4- |
| 7 |
DIR2+ |
第2軸脈沖信號 |
41 |
DIR4+ |
第4軸脈沖信號 |
| 8 |
DIR2- |
42 |
DIR4- |
|
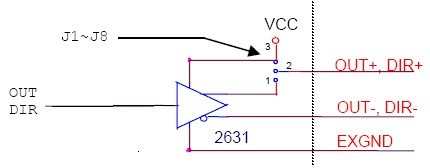 |
如果脈沖輸出為單端輸出模式,則 OUT-和 DIR-作為脈沖和方向信號的輸出端。OUT 和 DIR 端的電流由PCI接口的 5V 提供。
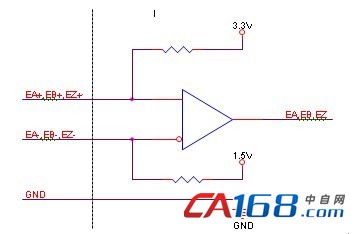
編碼器輸入信號EA,EB和EZ
編碼器輸入信號包括 EA、EB 和 EZ,每個軸都有三對差分的 A 相、B 相和 Z 索引信號,EA 和 EB 用來進行位置計數,EZ 可用作原點信號。每對差分輸入信號將被轉化成 EA、EB、EZ 的TTL 電平信號。
| 下表為編碼器輸入信號引腳號和說明: |
EA,EB,EZ信號在PCI-9024內部的原理,如下圖所示 |
| CN5引腳號 |
信號 |
說明 |
CN5引腳號 |
信號 |
說明 |
| 3 |
EA1+ |
第一軸A相信號 |
12 |
EA3+ |
第三軸A相信號 |
| 4 |
EA1- |
13 |
EA3- |
| 5 |
EB1+ |
第一軸B相信號 |
14 |
EB3+ |
第三軸B相信號 |
| 6 |
EB1- |
15 |
EB3- |
| 7 |
EZ1+ |
第一軸Z相信號 |
16 |
EZ3+ |
第三軸Z相信號 |
| C |
EZ1- |
17 |
EZ3- |
| 21 |
EA2+ |
第二軸A相信號 |
30 |
EA4+ |
第四軸A相信號 |
| 22 |
EA2- |
31 |
EA4- |
|
 |
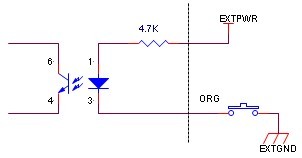
原點開關信號
原點信號輸入用于檢測該軸的原點,可通過用戶軟件設定回原點模式。其內部電路濾波電路,可以過濾小于噪聲,以提高系統的可靠性。
| 原點信號和軸如下表所示 |
原點信號輸入原理圖如下圖所示 |
| CN7引腳 |
信號 |
說明 |
CN7引腳 |
信號 |
軸 |
| 25 |
ORG1 |
第一軸原點信號 |
59 |
ORG3 |
第三軸原點信號 |
| 32 |
ORG2 |
第二軸原點信號 |
66 |
ORG4 |
第四軸原點信號 |
|
 |
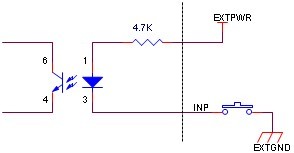
到位信號INP
到位信號來自伺服電機驅動器,指示位置誤差為零,INP信號(到位信號)主要時用于伺服接口的專用輸入信號,此信號被設置為有效時,如果正在輸出脈沖的過程中脈沖輸出完成后, 還必須等INP 信號出現,才能進入停止狀態。
| 到位信號,引腳號和軸號對照表如下表所示 |
INP信號輸入原理圖如下所示 |
| CN7引腳號 |
信號 |
軸號 |
CN7引腳號 |
信號 |
軸號 |
| 20 |
INP1 |
第一軸伺服到位信號 |
54 |
INP3 |
第三軸伺服到位信號 |
| 27 |
INP2 |
第二軸伺服到位信號 |
61 |
INP4 |
第四軸伺服到位信號 |
|
 |
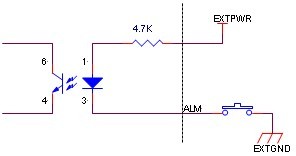
伺服報警信號ALM
此信號來自伺服電機驅動器的報警輸出信號。信號有效時,PCI-9024將停止輸出脈沖。
| 伺服報警信號,引腳號和軸號對照如下表 |
伺服報警信號輸入原理如下圖所示 |
| CN7引腳號 |
信號 |
說明 |
CN7引腳號 |
信號 |
說明 |
| 19 |
INP1 |
第一軸報警信號 |
53 |
INP3 |
第三軸報警信號 |
| 26 |
INP2 |
第二軸報警信號 |
60 |
INP4 |
第四軸報警信號 |
|
 |
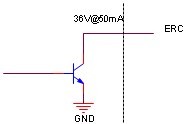
誤差清除信號ERC
誤差清除信號用于向伺服電機驅動器發出清除內部誤差計數器命令;在下面情況在,PCI-9024輸出有效地ERC信號:1,查找原點完成;2,極限開關有效;3,告警ALARM信號使運動軸停止;4,緊急停止。
| ERC信號,引腳號和軸號對照如下表 |
ERC信號原理如下圖所示 |
| CN7引腳號 |
信號 |
說明 |
CN7引腳號 |
信號 |
說明 |
| 13 |
ERC1 |
第一軸誤差清除信號 |
47 |
ERC3 |
第三軸誤差清除信號 |
| 14 |
ERC2 |
第二軸誤差清除信號 |
48 |
ERC4 |
第四軸誤差清除信號 |
|
 |
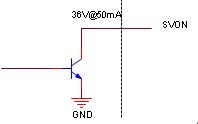
伺服使能信號SVON
該信號用于控制伺服驅動器的使能端你,低電平有效
| SVON信號名,針腳名和說明對照 |
SVON信號名,針腳名和說明對照 |
| CN7引腳號 |
信號 |
說明 |
| 21 |
RDY1 |
第一軸READY信號 |
| 28 |
RDY2 |
第二軸READY信號 |
| 55 |
RDY3 |
第三軸READY信號 |
| 62 |
RDY4 |
第四軸READY信號 |
|
 |
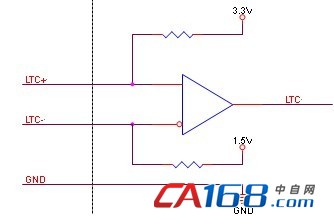
位置鎖存輸入信號LTC
JMC-2410 卡每一軸都提供一個位置鎖存輸入信號 LTC; 5V 的 LTC 信號會觸發位置鎖存器,捕獲當前編碼器位置或當前指令位置。
| LTC信號,引腳號和軸號對照如下表所示 |
LTC信號輸入原理圖如下所示 |
| CN5引腳 |
信號 |
軸號 |
CN5引腳 |
信號 |
軸號 |
| 34 |
LTC1+ |
1 |
19 |
LTC3+ |
3 |
| 9 |
LTC1- |
1 |
20 |
LTC3- |
3 |
| 27 |
LTC2+ |
2 |
17 |
LTC4+ |
4 |
| 28 |
LTC2- |
2 |
18 |
LTC4- |
4 |
|
 |
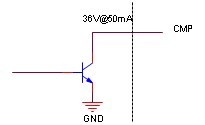
位置比較輸出信號CMP
JMC-2410卡每個軸配有1個位置比較輸出接口,通過軟件使能后,可分別設置觸發條件,當某非軸的命令寄存器內的數值或編碼器內數值觸發條件時,硬件自動在CMP1-CMP4輸出電平信號
| CMP信號,引腳號和軸號對照表如下表所示 |
CMP信號輸出原理圖如下圖所示 |
| CN7引腳號 |
信號名 |
| 15 |
CMP1 |
| 16 |
CMP2 |
| 49 |
CMP3 |
| 50 |
CMP4 |
|
 |
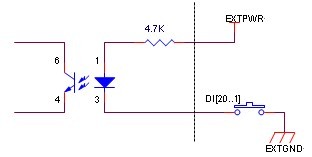
通用數字輸入信號DI
JMC-2410提供了20路隔離數字輸入接口,供用戶使用
| 通用數字輸入信號,引腳號和軸號如下表所示 |
通用數字輸入信號原理圖如下圖所示 |
| CN7引腳 |
信號名 |
CN6引腳 |
信號名 |
CN6引腳 |
信號名 |
| 17 |
DI1 |
1 |
DI5 |
9 |
DI13 |
| 18 |
DI2 |
2 |
DI6 |
10 |
DI14 |
| 51 |
DI3 |
3 |
DI7 |
11 |
DI15 |
| 52 |
DI4 |
4 |
DI8 |
12 |
DI16 |
| |
|
5 |
DI9 |
13 |
DI17 |
| |
|
6 |
DI10 |
14 |
DI18 |
| |
|
7 |
DI11 |
15 |
DI19 |
| |
|
8 |
DI12 |
16 |
DI20 |
|
 |
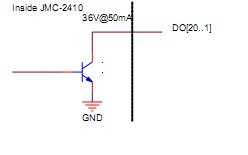
通用數字輸出信號DO
JMC-2410提供了20路隔離的開集電極輸出
| 通用數字輸出信號,引腳號和軸號如下表所示 |
通用數字輸出信號原理圖如下圖所示 |
| CN7引腳 |
信號名 |
CN6引腳 |
信號名 |
CN6引腳 |
信號名 |
| 9 |
DO1 |
21 |
DO5 |
29 |
DO13 |
| 10 |
DO2 |
22 |
DO6 |
30 |
DO14 |
| 43 |
DO3 |
23 |
DO7 |
31 |
DO15 |
| 44 |
DO4 |
24 |
DO8 |
32 |
DO16 |
| |
|
25 |
DO9 |
33 |
DO17 |
| |
|
26 |
DO10 |
34 |
DO18 |
| |
|
27 |
DO11 |
35 |
DO19 |
| |
|
28 |
DO12 |
36 |
DO20 |
|
 |



