



JMC-2610是一款高性價比4軸運動控制卡;使用了FPGA處理芯片,可實現參數計算、手輪輸入、飛行加/減速處理,支持多軸同步、板卡ID設置、動態修改目標位置、非對稱加減速等功能;可接受編碼器信號,并提供位置鎖存函數。當鎖存信號被觸發,編碼器當前位置就立即被捕獲,并可產生中斷。捕獲當前位置信號過程由硬件高速完成。
信號連接
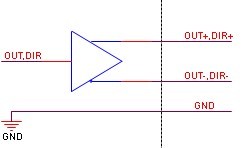
| 脈沖信號和方向信號輸出 各軸的OUT和IR輸出口是用于輸出脈沖和方向信號,其輸出格式可以有程序設定成CW/CCW雙脈沖模式后脈沖+方向模式 ,如果脈沖輸出為單端輸入模式,則OUT-和DIR-作為脈沖和輸出信號的輸出端,使用CN1上的5V來作為控制信號的電源。 |
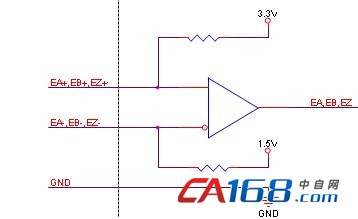
編碼器輸入信號EA,EB和EZ 編碼器輸入信號包括EA,EB和EZ,每個軸都有三對差分 A相,B相,Z索引信號EA和EB用來進行位置計數,EZ可用作原點信號,每對差分輸入信號將被轉化成EA,EB,EZ的TTL電平信號,下表為編碼器輸入信號引腳號和說明: |
 |
 |
編碼器輸入信號接線方法如下:
| 1,差分輸入模式 在此模式下,輸入信號的正端接EA+/EB+/EZ+端,負載接EA-/EB-/EZ-端 |
2,單端輸入模式 在此模式下,輸入信號接到差分輸入的EA+/EB+/EZ+端,EA-/ EB-/EZ-端懸空。 |
 |
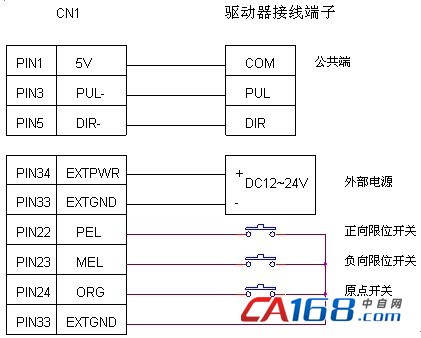 |
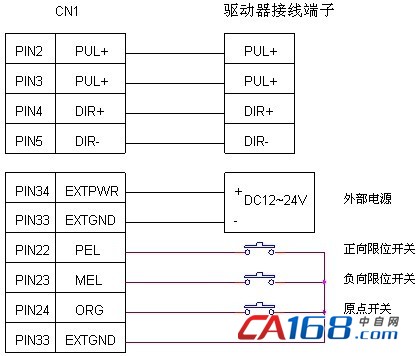
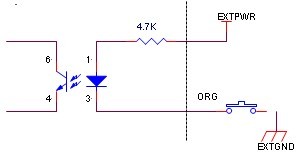
| 原點開關信號 1,原點信號輸入用于檢測該軸的原點,可通過用戶軟件設定回 原點模式,其內部有濾波 2,電路,可以過濾小于噪聲,以提高系統的可靠性。 3,原點信號輸入原理圖如下圖所示 |
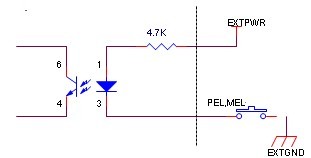
正反向限位信號PEL/MEL 每一軸都有兩個限位信號PEL(正限位)和MEL(限位),用戶通過S1撥碼開關設置限位信號的有效電平來選擇開關為常閉方式或 者常開方式。 EL信號輸入原理圖如下圖所示: |
 |
 |
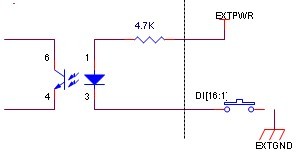
| 通用輸入信號DI JMC-2060提高了16路隔離數字輸入接口,供用戶使用通用數字輸入信號原理圖如下圖所示 |
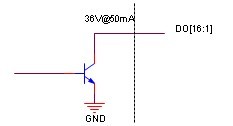
通用輸出信號DO JMC-2610提供了16路非隔離的開集電極(OC)輸出 通用數字輸出信號原理圖如下圖所示: |
 |
 |
| 軟件支持: | 訂購信息: |
| 1,OS支持Windows2000,WindowsXP,Windows XPE 2,DLL動態鏈接庫用于客戶二次開發 3,提供MotiongPannel,可在開發階段來調試運動控制 系統 4,支持使用C/C++,Visual Basic進行運動控制程序開 發,并提供例程 |
1,JMC-1410:四軸步進運動控制卡 2,DIN-68:68pin端子板,帶DIN模塊可安裝 3,ACL68:68pin SCSL-II電纜 |
| 規格 | 應用范圍 |
| 1,32位PCI總線,支持3.3和5V 2,4軸步進電機控制 3,輸出脈沖高達5MHZ 4,脈沖輸出可選:OUT/DIR , CW/CCW 5,支持T型和S型速度曲線 6,支持運動過程中改變速度(飛行變速 ) 7,可編程加速和減速時間 8,用于增量式編碼器的28位雙向計數器 9,所有的數字輸入隔離大道2500VRMS 10,對限位開關,原點開關,專用的I/O接口 11,可編程的中斷源 12,支持片選ID 13,12路開集電極非隔離數字輸出(DO) 14,10路隔離數字輸入 |
1,半導體相關生產設備
|