


以下中國機(jī)器視覺商城(www.china-vision.com.cn)小編將以“投彈演習(xí)靶場的投彈點(diǎn)位置實(shí)時(shí)測量”為例,為大家詳解該方案的技術(shù)要點(diǎn),該方案的技術(shù)原型是以“雙目立體視覺標(biāo)定軟件CCAS”為基礎(chǔ)。
首先,投彈點(diǎn)位置精確測量是驗(yàn)證戰(zhàn)斗機(jī)投彈系統(tǒng)的重要組成模塊。美國在投彈點(diǎn)位置測量系統(tǒng)精度已經(jīng)能達(dá)到2米,中國某投彈演習(xí)靶場的測量系統(tǒng)精度能達(dá)到50cm。
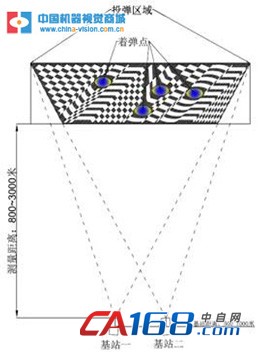
如上圖所示,該圖是投彈演習(xí)測量現(xiàn)場的平面圖。其中,基站一、二處分別布置了2臺網(wǎng)口工業(yè)相機(jī),相機(jī)圖像數(shù)據(jù)通過光纖傳輸?shù)綔y量指揮站(圖上未標(biāo)示)。“投彈區(qū)域”是雙相機(jī)的共同視場部分。目前的測量距離為800到3000米,雙相機(jī)的基站距離為800到1000米。基站距離和測量距離成正比,測量距離越遠(yuǎn),基站距離越大。
該項(xiàng)目是一種典型的雙目立體視覺測量應(yīng)用。其原理為:先利用現(xiàn)場標(biāo)定靶和GPS定位將雙相機(jī)的位置關(guān)系標(biāo)定出來。由于測量距離遠(yuǎn),焦距長,故認(rèn)為相機(jī)鏡頭模型為理想模型。然后,雙基站的相機(jī)實(shí)時(shí)采集圖像進(jìn)行實(shí)時(shí)處理。當(dāng)左右相機(jī)均找到著彈點(diǎn)的煙霧后,進(jìn)行立體匹配,計(jì)算煙霧的坐標(biāo)。默認(rèn)著彈點(diǎn)和相機(jī)處于同一平面,著彈點(diǎn)在山體上的可提前得出著彈點(diǎn)距離海平面的距離(Z軸數(shù)據(jù)始終為已知)。該項(xiàng)目視覺技術(shù)難點(diǎn)解析:
第一、投彈點(diǎn)位置獲取。由于是在野外,陰天、晴天等光照因素會印象相機(jī)對被測目標(biāo)的獲取。要直接獲取彈頭,基本不可能實(shí)現(xiàn)。故該項(xiàng)目采用獲取彈頭著地后的煙霧作為標(biāo)志點(diǎn)。
第二、圖像分割。實(shí)際現(xiàn)場中拍攝的圖像中有云彩、有羊群、樹木等干擾物,采用傳統(tǒng)的灰度分割無法準(zhǔn)確的獲取煙霧輪廓。故本項(xiàng)目采用幀差分法,完美解決問題。
第三、系統(tǒng)標(biāo)定。由于測量距離遠(yuǎn),基站位置遠(yuǎn),故系統(tǒng)標(biāo)定比較困難。實(shí)際項(xiàng)目中采用大范圍標(biāo)靶和衛(wèi)星定位相結(jié)合的方式進(jìn)行標(biāo)定。